

Fine-adjustment positioning method of fruit and vegetable picking point
A positioning method and picking point technology, applied in the field of agricultural robots, can solve problems such as time-consuming, complex three-dimensional reconstruction algorithms, and inability to meet the real-time requirements of robots, and achieve the effect of improving work reliability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
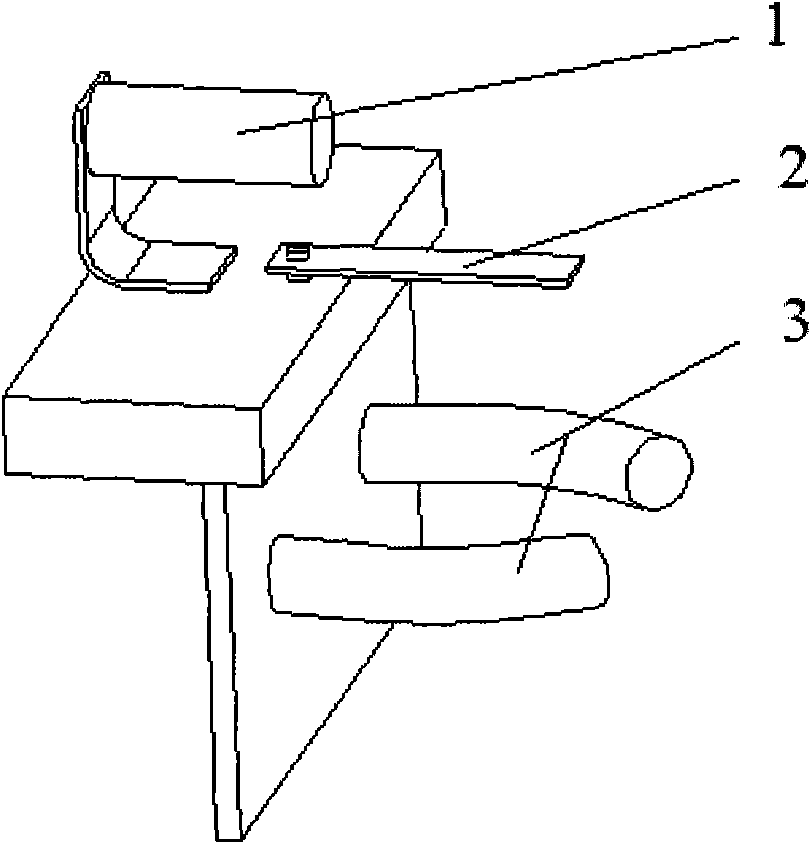
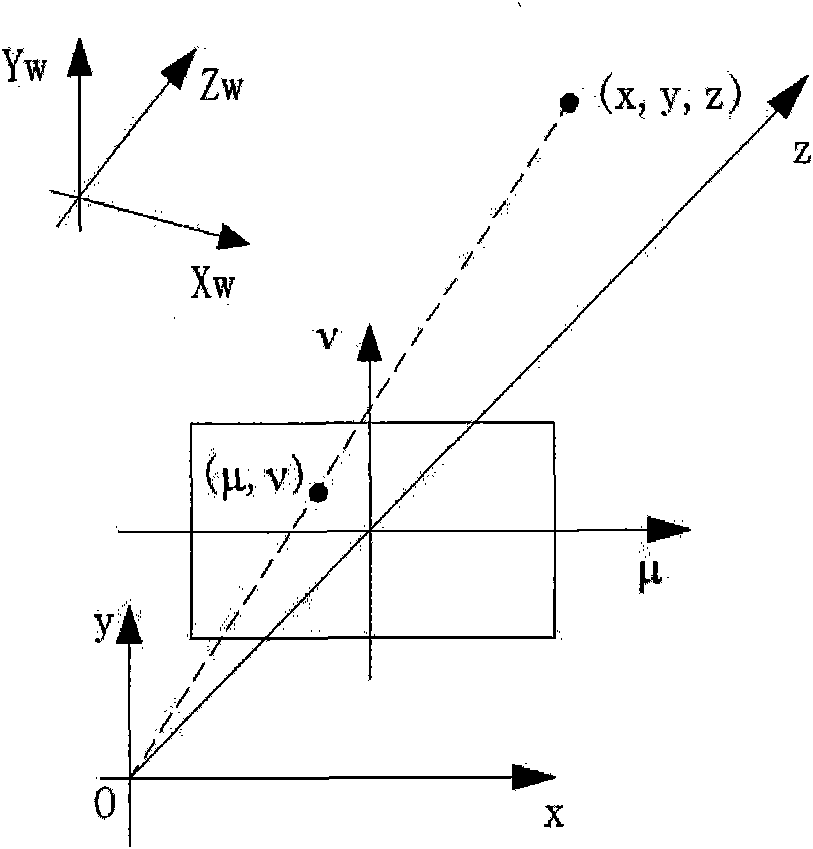
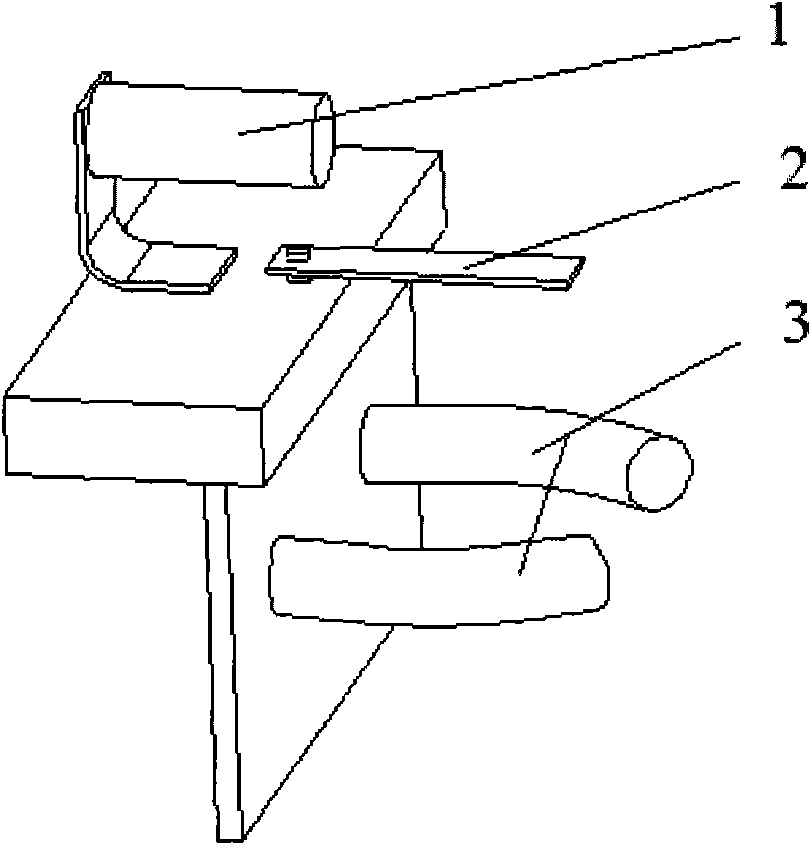
[0031] like figure 1 The secondary fine-tuning and positioning device of the picking robot shown uses a color miniature CCD camera 1 to collect the close-range position information of the cucumber grabbing area, and installs it directly above the cutter 2 and the claw 3 at the end of the mechanical arm. like figure 2 As shown, the camera coordinate system is composed of the camera optical center O and the x, y, z axes, and the X w , Y w ,Z w Axes form a three-dimensional coordinate system in space, and u and v axes form an image coordinate system.
[0032] During the picking process, according to the first positioning data of the picking robot, the picking robot arm ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More