

Robot path planning method based on two cooperative competition particle swarms and Ferguson spline
A path planning and robotics technology, applied in the field of robotics, can solve problems such as oscillation before obstacles, difficulty in achieving real-time path planning, and unfavorable robot motion control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be described in further detail below with reference to the accompanying drawings.
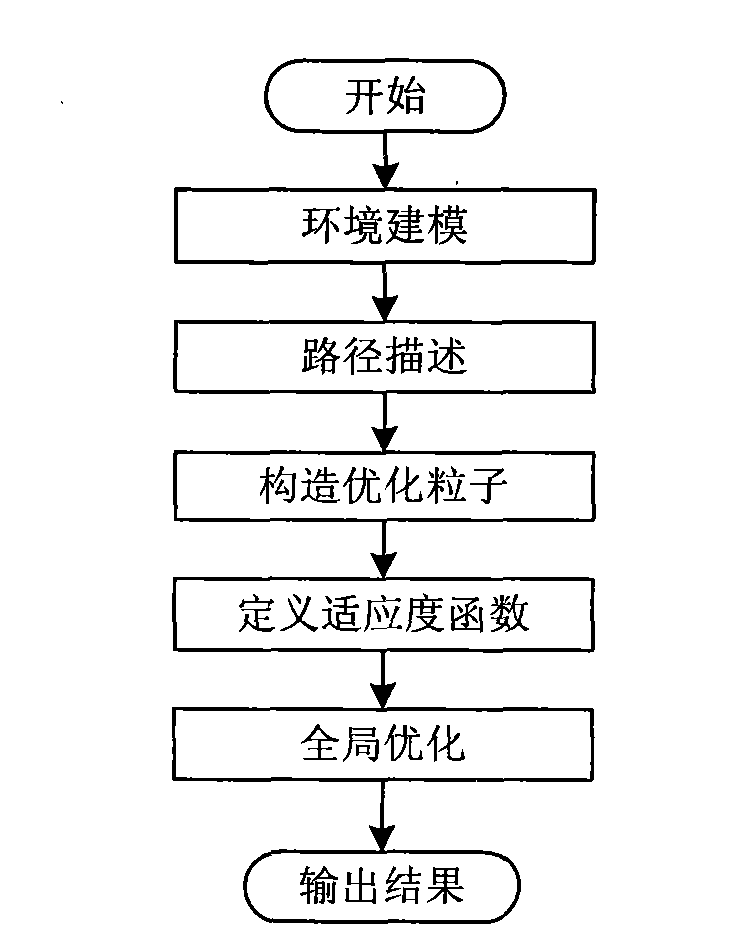
[0045] refer to figure 1 , the steps of path planning in the present invention are as follows:
[0046] Step 1, modeling the robot motion environment.
[0047]In a certain room, the robot is simplified to a point, the field length range is [-1000, 1000], and the width range is [-1000, 1000]; the current coordinates and orientation angle of the robot and the target coordinates and orientation angle are given, that is, the current coordinates are [-880 -880], the current orientation angle is [600 400], the target coordinates are [300 300], and the target orientation angle is [-300100].
[0048] Step 2, using Ferguson splines to describe the path of the mobile robot.
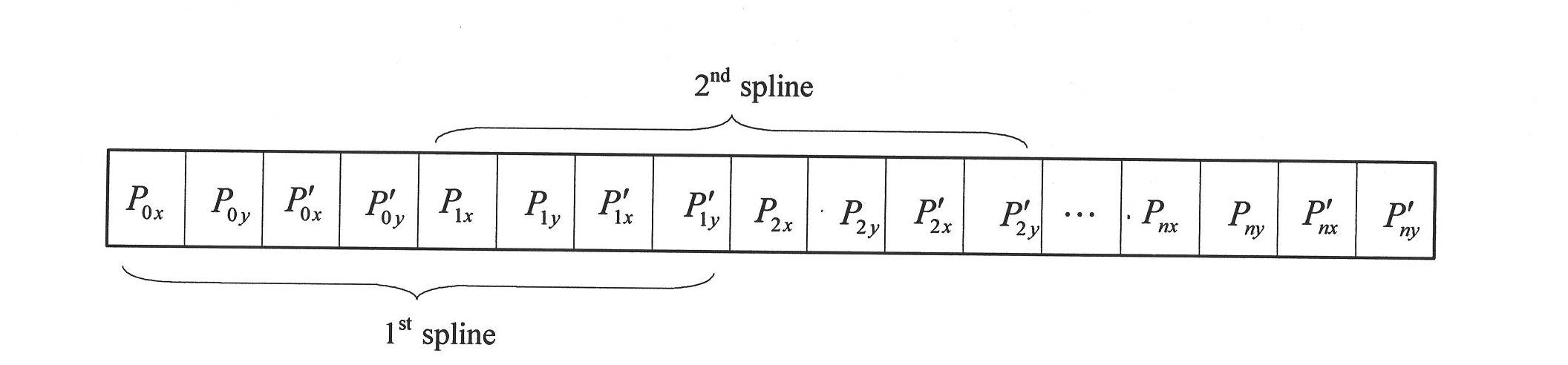
[0049] A Ferguson spline in two-dimensional space is expressed as:
[0050] r(t) = (x(t), y(t)) = P 0 f 1 (t)+P 1 f 2 (t)+P' 0 f 3 (t)+P' 1 f 4 (t)=a 0 +a 1 t+a 2 t 2 +a 3 t 3 1)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More