

Air pressure detection based robot foot structure and pressure detection method
A kind of air pressure detection and robot technology, which is applied in elastic deformation gauge type fluid pressure measurement, fluid pressure measurement, instruments and other directions. It can solve the problems of low measurement accuracy, complicated installation and complicated design, and achieve high measurement accuracy and strong adaptability. , the effect of easy installation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
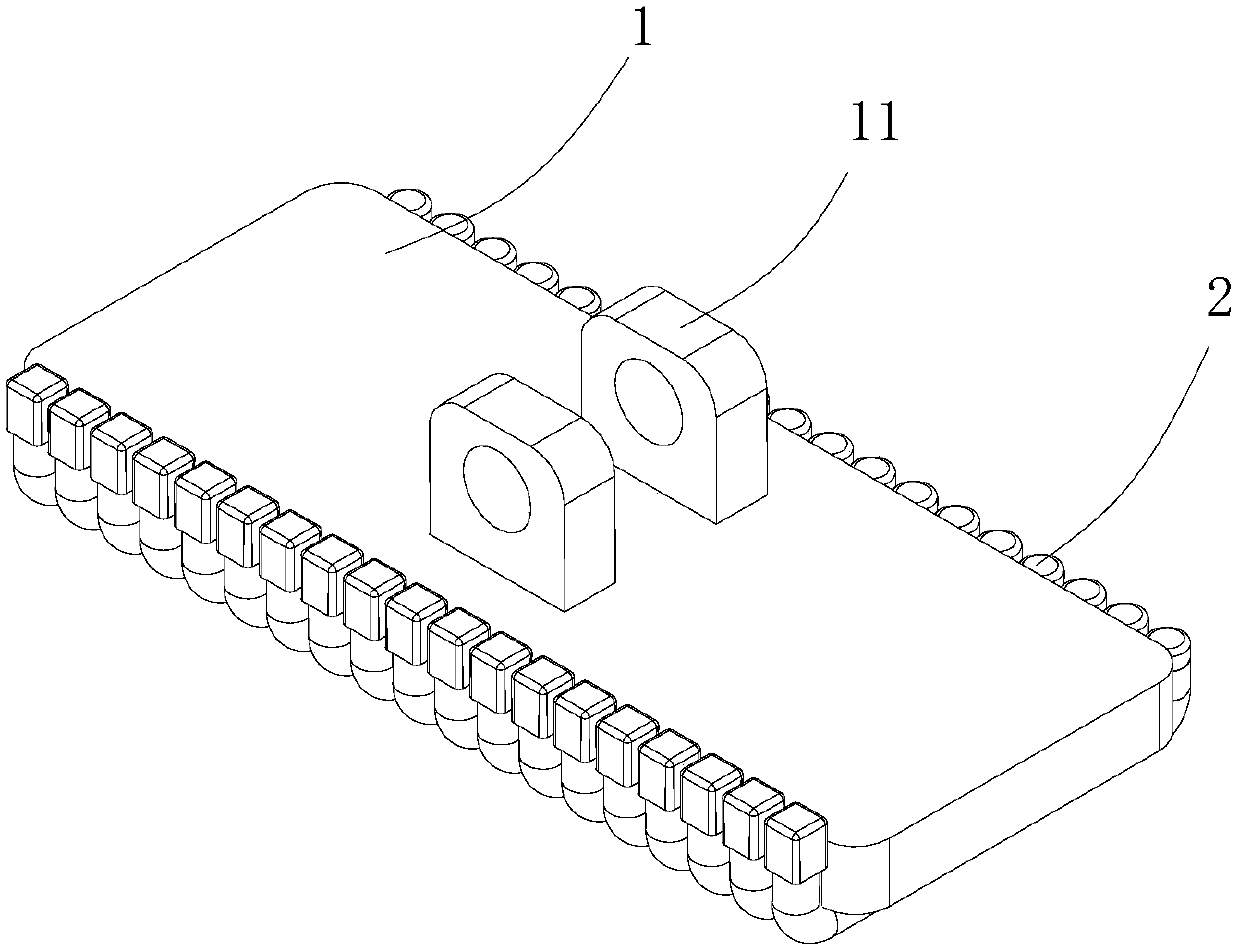
[0045] This embodiment provides a robot foot structure based on air pressure detection, such as figure 1 As shown in -3, it includes a foot plate 1, an air pressure detection unit 2.
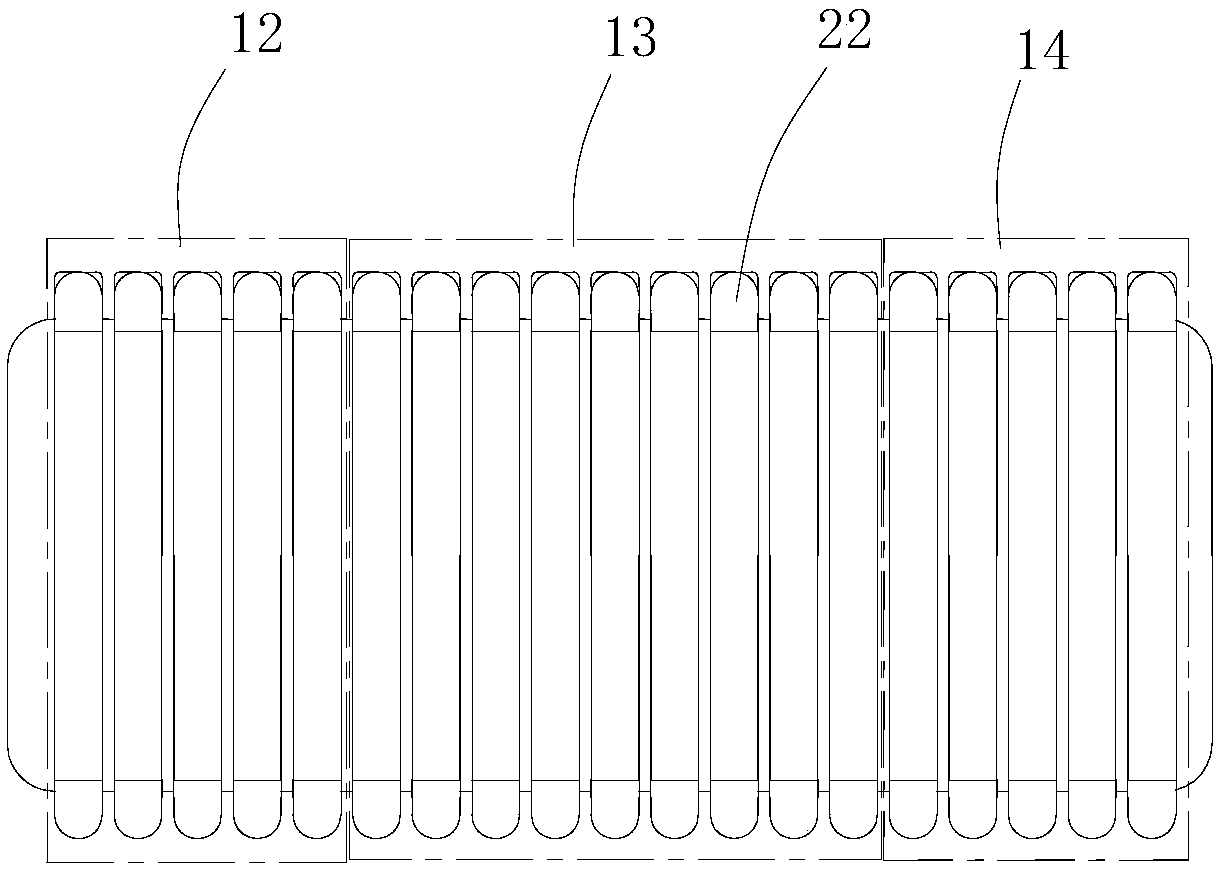
[0046] Among them, the foot plate 1 has a square structure, and a connecting assembly 11 for connecting the legs of the robot is provided above the foot plate 1 to facilitate the modularization of the entire foot structure production and manufacturing process. The entire footboard 1 is divided into a forefoot detection area 12, a midfoot detection area 13, and a backfoot detection area 14.
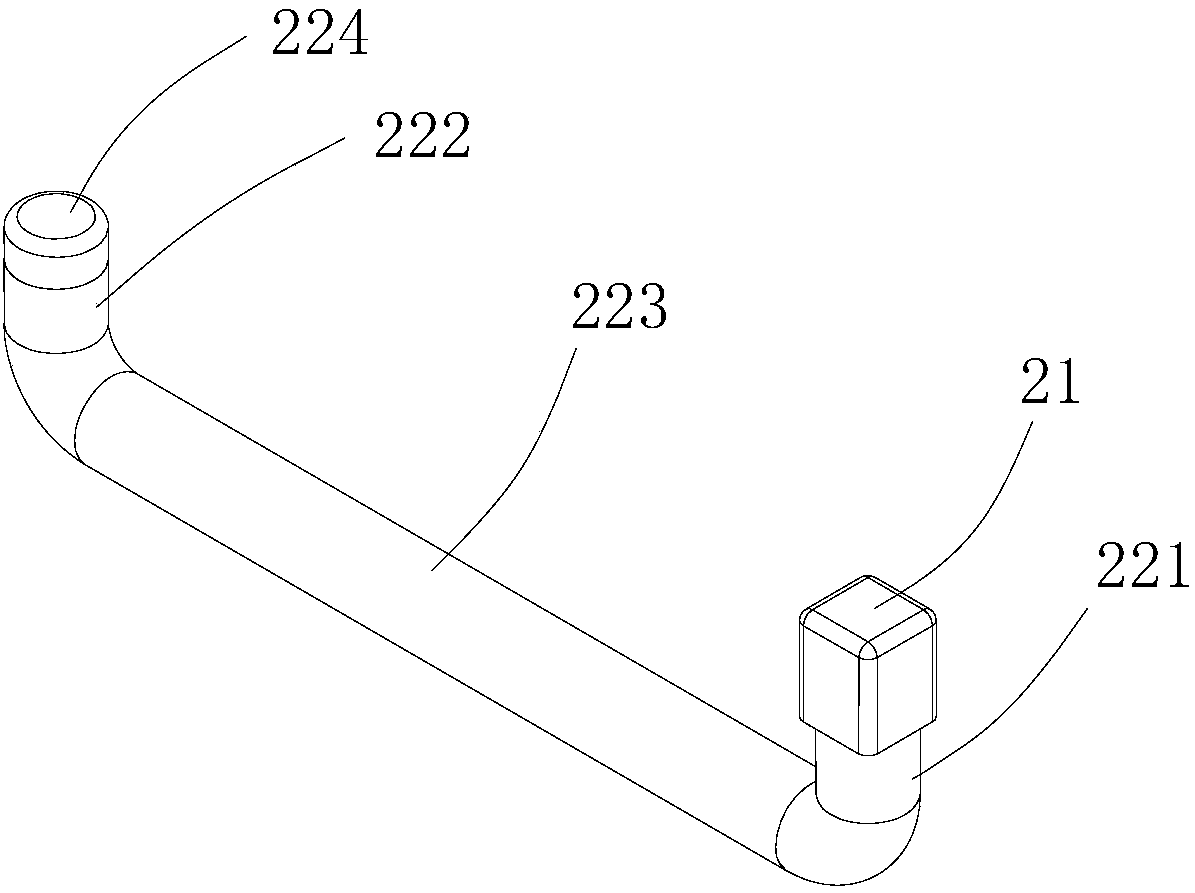
[0047] The air pressure module includes a plurality of air pressure detecting units 2, which include an air pressure sensor 21 and a tubular airbag 22. The tubular airbag 22 in each air pressure monitoring unit 2 is linearly arranged along the front and rear direction of the foot plate 1. An arc-shaped connecting portion (not shown in the figure) is provided at the joint between the foot plate 1 and the tubular a...
Embodiment 2
[0054] This embodiment provides a robot foot structure based on air pressure detection, such as Figure 4 As shown in -5, it includes the foot board 3 and the air pressure monitoring unit 4.
[0055] Among them, the foot plate 3 is a trapezoid-like structure with a modular design, which facilitates the entire production process of the foot structure. The entire footboard 3 is divided into a forefoot detection area 31, a midfoot detection area 32, and a backfoot detection area 33.
[0056] The air pressure module includes a plurality of air pressure detecting units 4, which include an air pressure sensor 41 and a block airbag 42. The block airbag 42 in each air pressure monitoring unit 4 is arranged in an array along the center of the footboard. The connecting part of the foot board 3 and the block airbag is provided with a groove (not shown in the figure), and the block airbag 42 has a structure such as Figure 5 As shown, it includes an airbag body for placing the connecting piec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More