

Servo system self-adaptive robust controller with dynamic frictional compensation
An adaptive robust and dynamic friction technology, applied in the field of robust control, can solve the problems of difficult to accurately compensate the friction force of the motor servo system, difficult to describe the friction characteristics of the friction model, and unable to guarantee the control performance of the system.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in detail below with reference to the accompanying drawings and examples.
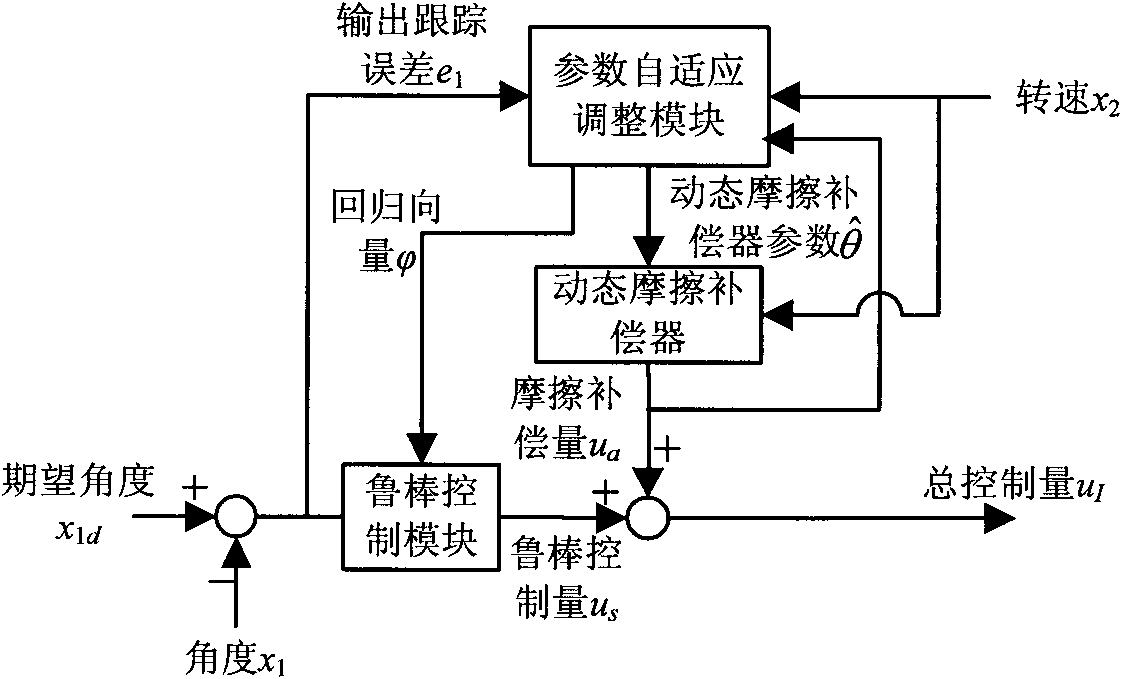
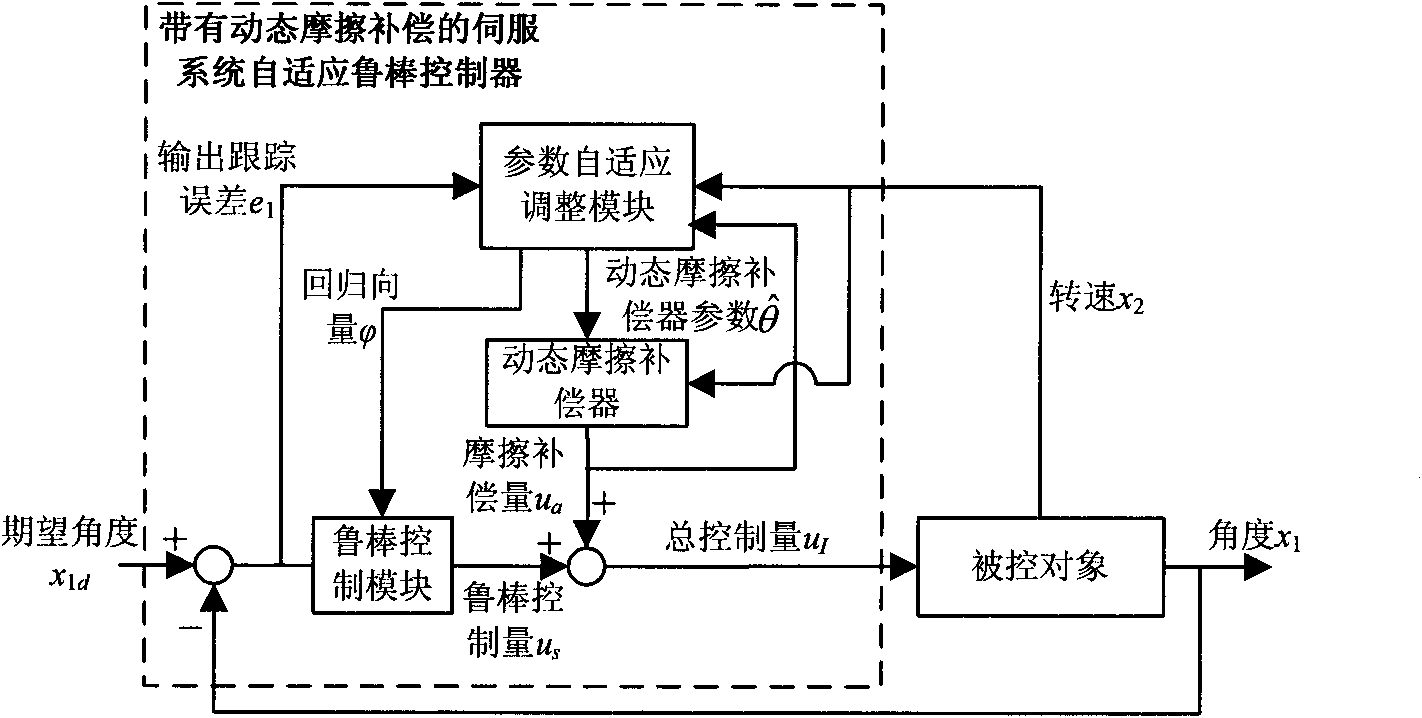
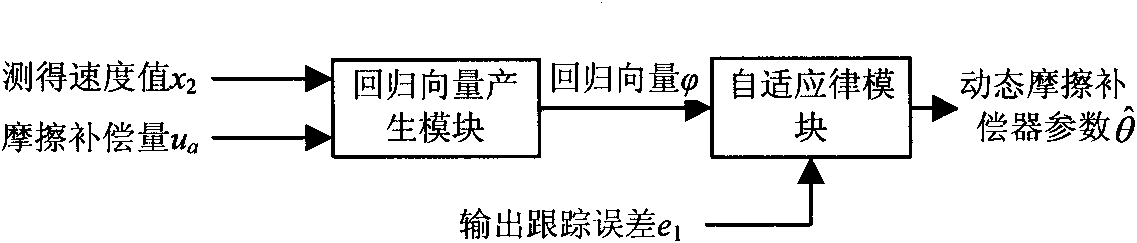
[0039] The invention provides an adaptive dynamic friction compensation scheme for a motor servo system, the basic idea of which is: using a friction model approximator constructed by the Lipschitz coefficient of the LuGre dynamic friction model, and through a robust adaptive law, according to the system output error Adjust the parameters of the friction approximator to make the parameters converge to the optimal value. The dynamic friction compensator compensates the friction according to the estimated value of the parameters, suppresses the adverse effect of the friction on the output tracking accuracy and response speed of the motor servo system, and improves the control performance of the motor servo system.
[0040] figure 1 It is a structural schematic diagram of an adaptive robust controller for a servo system with dynamic friction compensation i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More