

Fault-tolerance autonomous navigation method of multi-sensor of high-altitude long-endurance unmanned plane
A multi-sensor, autonomous navigation technology, applied in directions such as integrated navigators, can solve the problems affecting aircraft navigation accuracy, GPS signals are susceptible to electromagnetic interference, error accumulation, etc., and achieve the effect of facilitating system reconstruction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
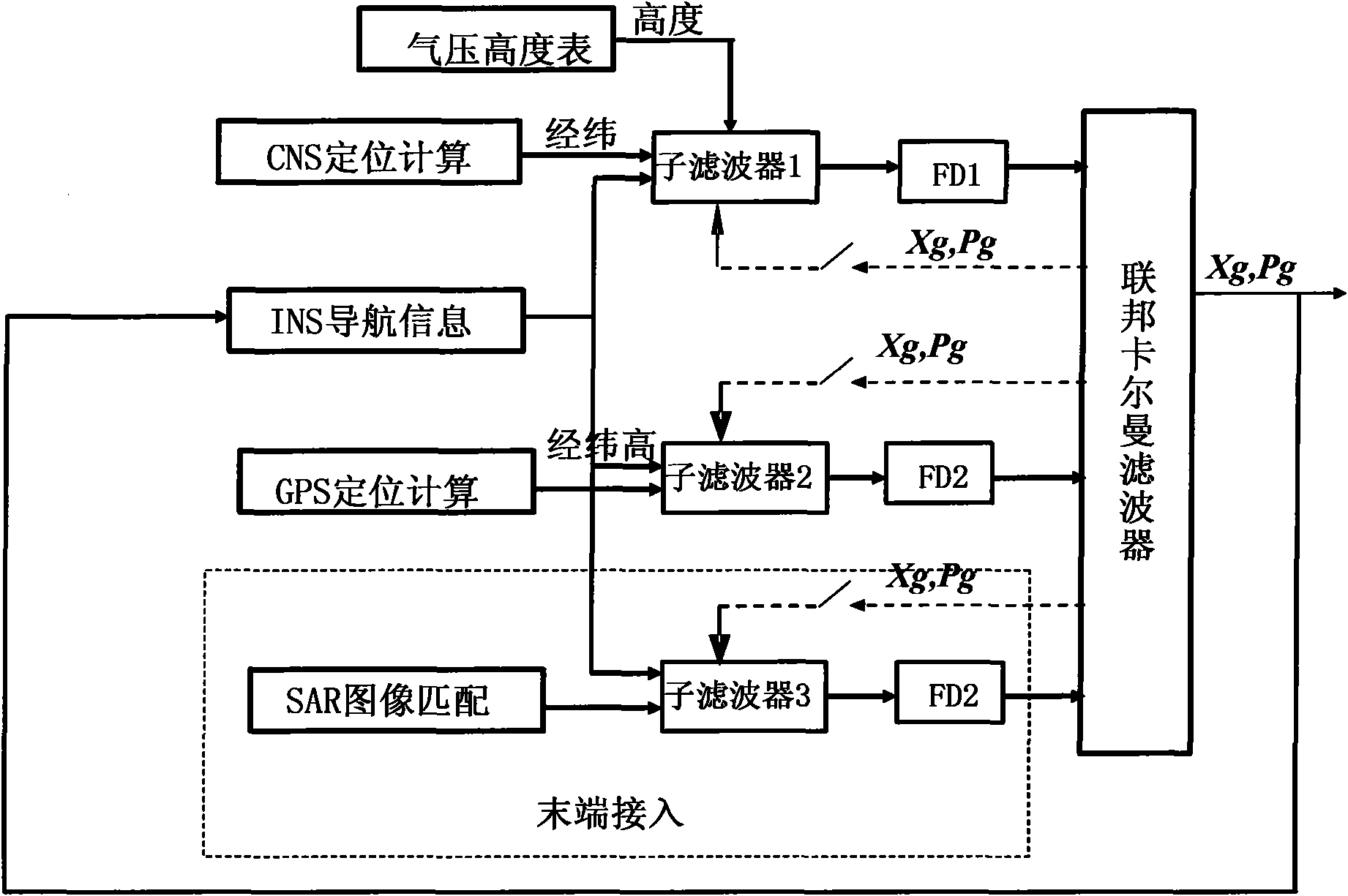
[0026] Below in conjunction with accompanying drawing, the technical scheme of invention is described in detail:
[0027] Such as figure 1 Shown, the principle of the present invention is: from the angle of airborne geographic system navigation, set up the position linearization measurement equation under the geographic system, including GPS / INS measurement equation, CNS / barometric altimeter / INS measurement equation and SAR / INS measurement equations. The specific implementation method is as follows:
[0028] 1. Establish the error state quantity equation of the aviation airborne inertial navigation system
[0029] Select the navigation coordinate system as the Northeast Heaven Geographical Horizontal Coordinate System (O n x n Y n Z n ), combined with a linear Kalman filter, the state equation of the system is the error state quantity equation of the inertial navigation system, through the analysis of the performance and error sources of the inertial navigation system, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More