

Initialization method for redundant manipulator motion planning
An initialization method and motion planning technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of tediousness, inaccurate measurement of task execution positions, and affecting the completion of tasks of the manipulator, so as to achieve a small amount of calculation and less work. , the effect of convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0021] The present invention will be further described below in conjunction with the accompanying drawings.
[0022] figure 1 The initialization method of a redundant manipulator motion planning shown is mainly by adjusting the manipulator to the limit position 1, turning it into a quadratic programming problem 2, a quadratic programming solver 3, driving the manipulator to the task execution position 4 composition.
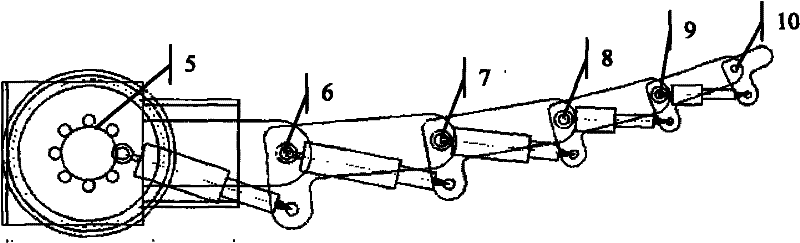
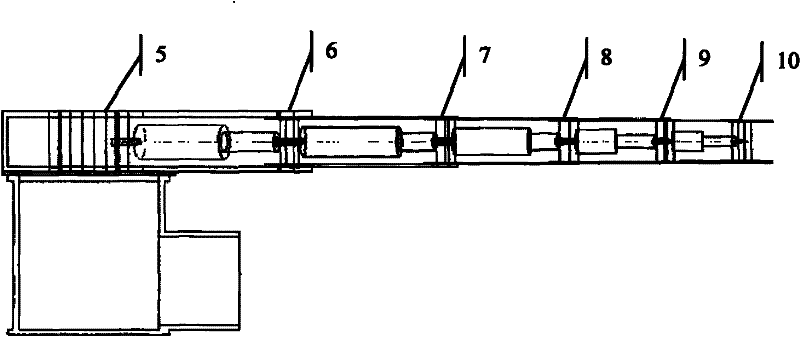
[0023] figure 2 , image 3 , Figure 4 and Figure 5 The redundant manipulator shown is a planar six-link redundant manipulator, mainly composed of joints 5, 6, 7, 8, 9 and 10.
[0024] First start the controller of the redundant manipulator, adjust the redundant manipulator to the limit position; then use the limit position as the initial value of the initialization method, and set the task execution position of the manipulator as the end value of the initialization method, so that Transform the control problem of the manipulator into the corresponding qu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More