

Sweeping robot and walking control method for same
A cleaning robot and walking direction technology, applied in manual sweeping machines, non-electric variable control, position/direction control, etc., can solve problems such as low work efficiency, reduced acceptance, irregular walking of cleaning robots, etc., to improve work efficiency , Avoid repeated cleaning areas and missed areas, and the effect of efficient path planning control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0077] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
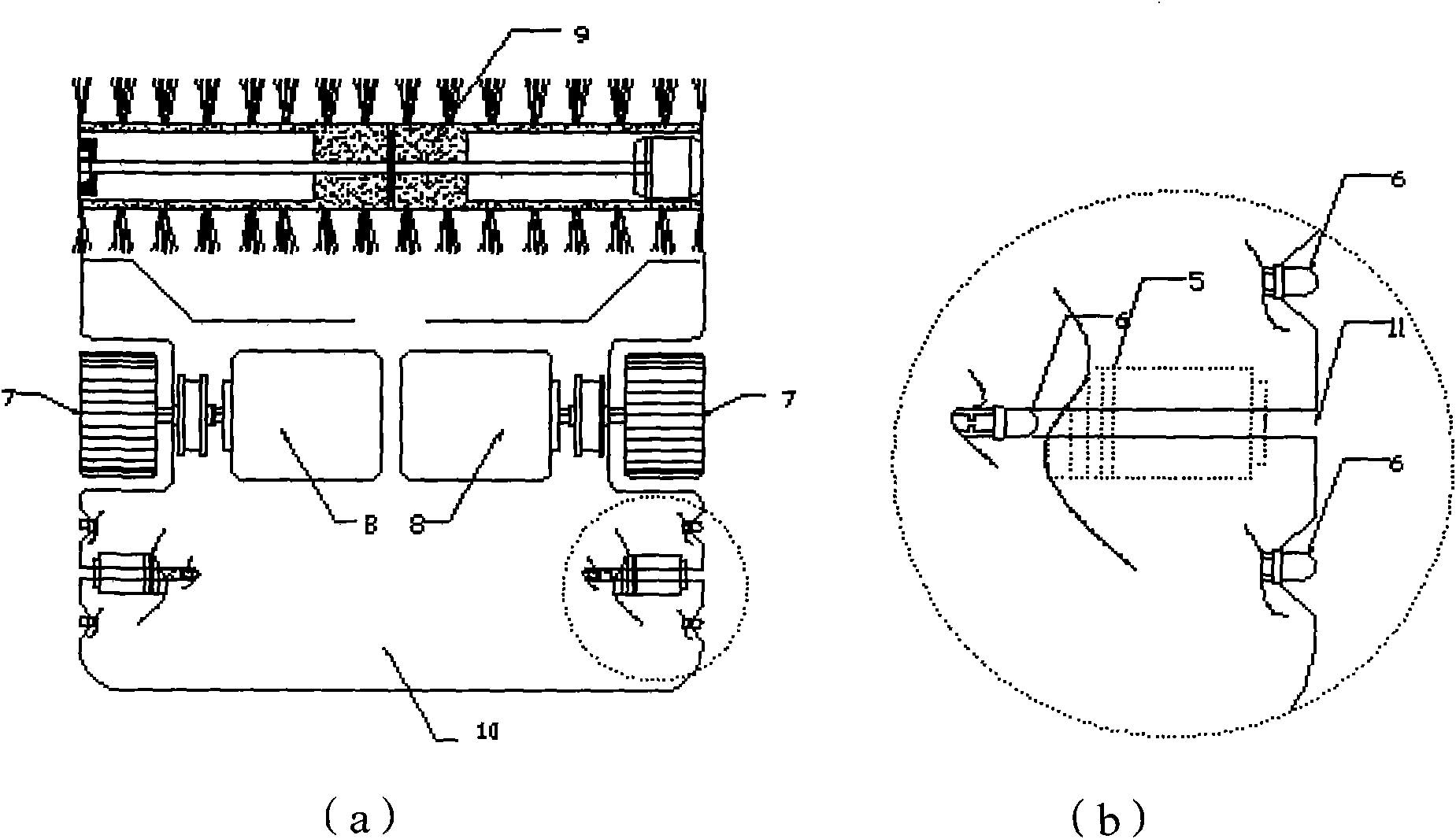
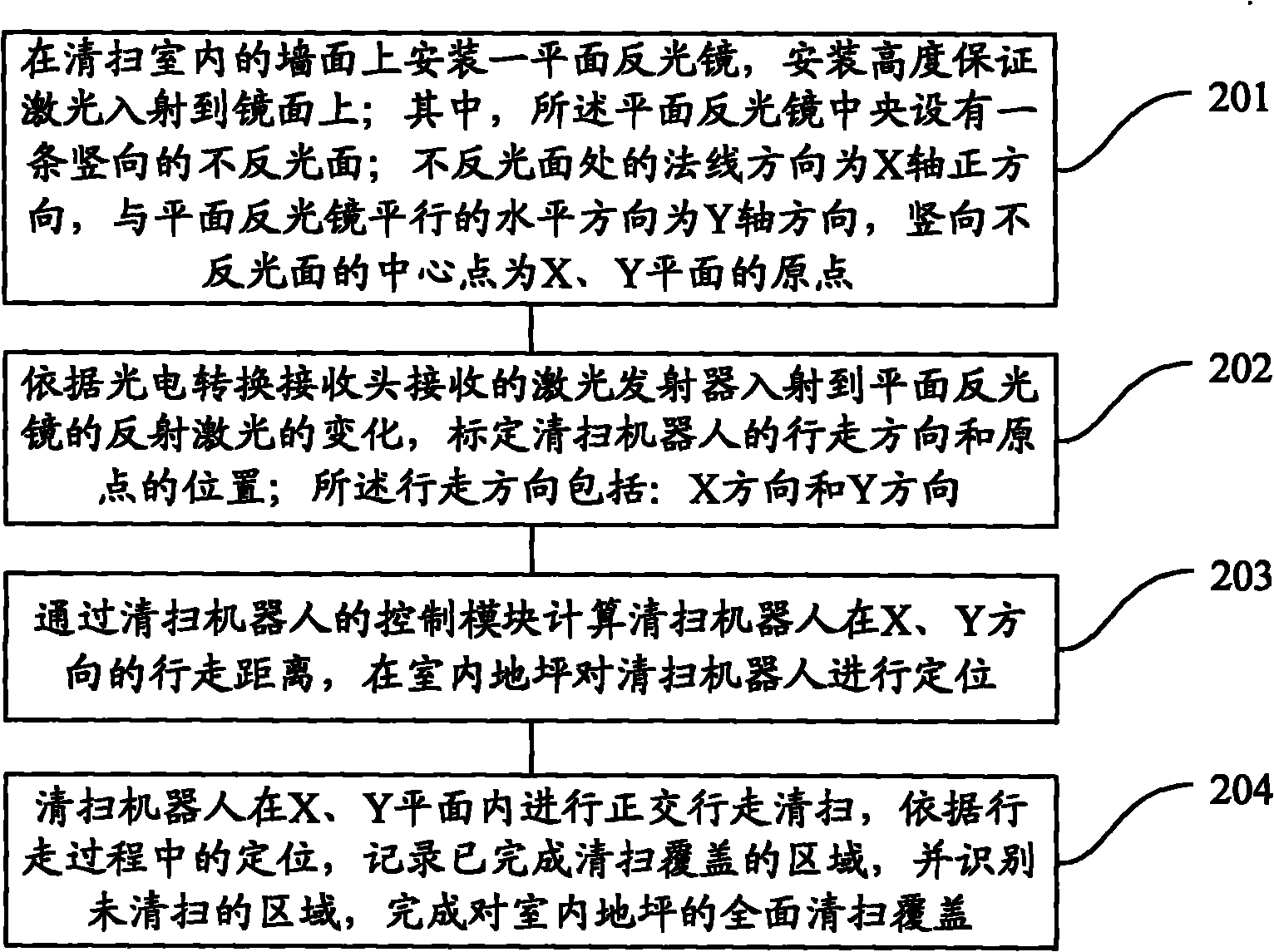
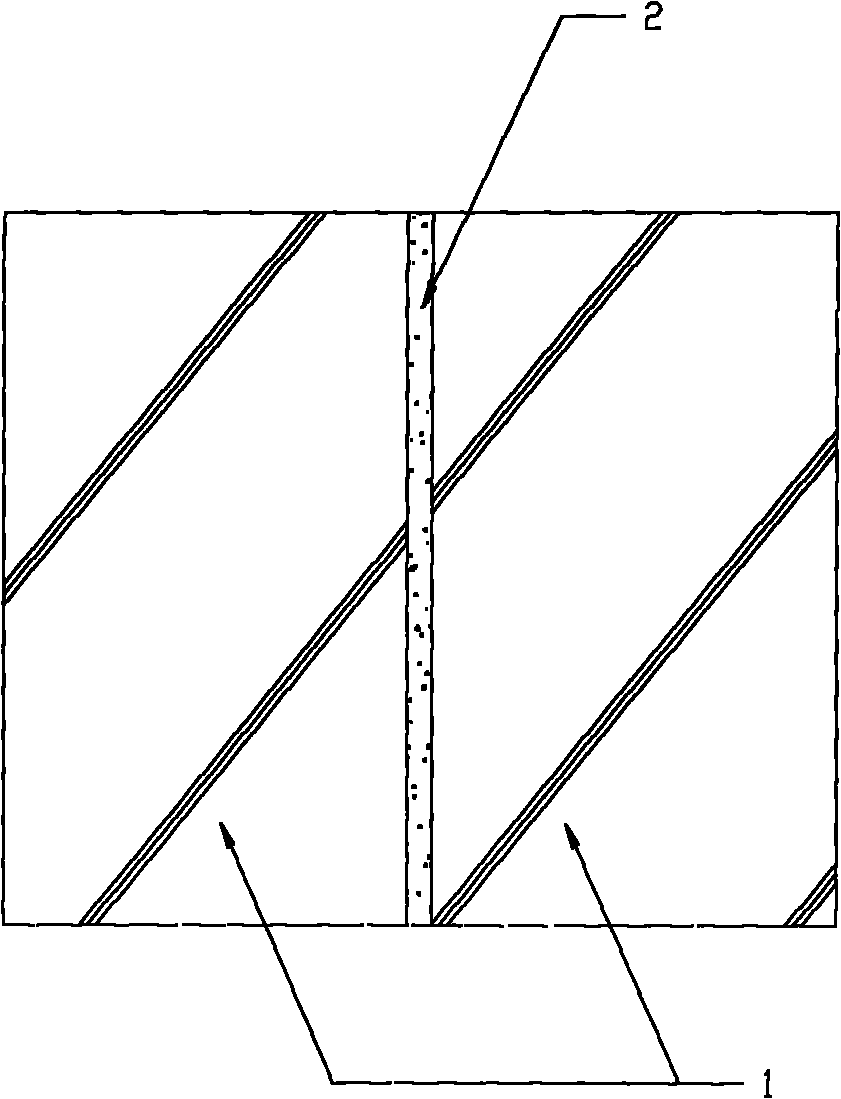
[0078] For cleaning robots to achieve efficient and orderly indoor cleaning, the key is that the robot needs reference objects when positioning indoors, high-precision direction guidance when walking, and identification of completed and unfinished cleaning areas. In order to solve the problem of walking control within the cost range that is more acceptable to the market, this invention proposes a walking control method for cleaning robots, which uses a relatively cheap sensor system and a more effective algorithm program to enable the cleaning robot to operate indoors with high precision. Direction guidance, precise positioning, can identify and record the working area. In order to complete the indoor cleaning work efficiently.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More