

Rapid calibration method of line-structured light vision sensor based on space plane restriction
A technology of line structured light and calibration method, applied in the field of online structured light vision measurement system, can solve problems such as being unsuitable for on-site calibration, requiring high three-dimensional processing accuracy of targets, and limiting calibration accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The implementation process of the present invention will be described in detail below in conjunction with the accompanying drawings and a specific embodiment.
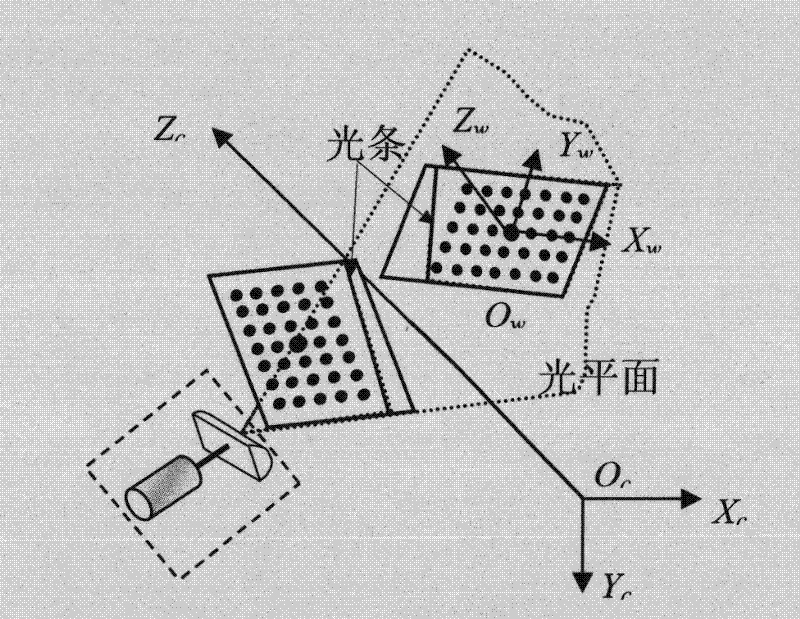
[0037] like Figure 4 As shown, the present invention is based on the calibration method of the line structured light visual measurement sensor constrained by the spatial plane, comprising the following steps:
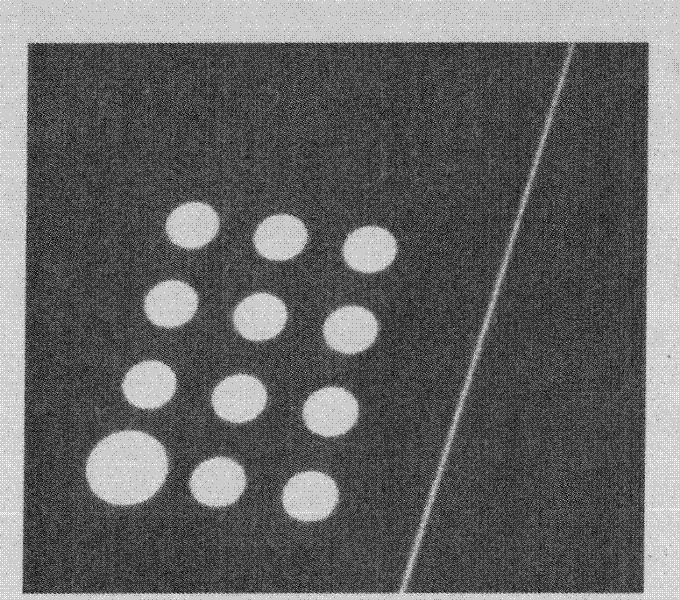
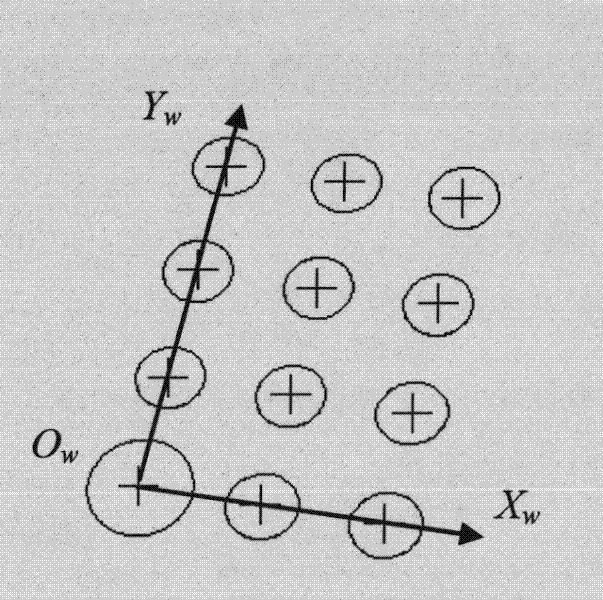
[0038] First, the acquired image of the designed two-dimensional planar target is as follows: Picture 1-1 and Figure 1-2 As shown, there are white feature circles arranged in a matrix on the target plane, the distance D between the centers of adjacent feature circles is selected as 10 mm, the spacing accuracy is (0.01 mm), and the number m of feature circles is 12 to 35. In this embodiment, m= 12. The determination of the values of m and D is mainly determined according to the size of the field of view of the specific camera and the range of the depth of field. The specific determination of the valu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More