

Field environment barrier detection method fusing distance and image information
A technology of image information and environmental obstacles, applied in the field of field environmental obstacle detection, can solve the problems of lack of environmental understanding, fusion detection effect decline, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0097] A kind of field environment obstacle detection method of fusion distance and image information of the present invention is introduced below in conjunction with accompanying drawing and embodiment:
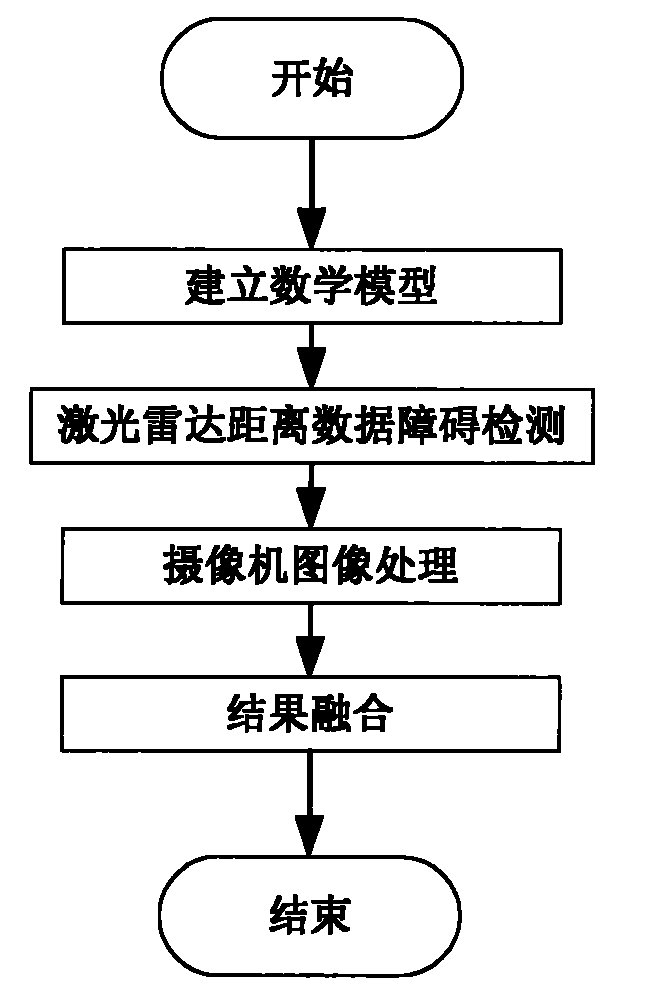
[0098] Such as figure 1 As shown, a field environment obstacle detection method that fuses distance and image information includes the following steps:
[0099] The first step: establish a mathematical model;
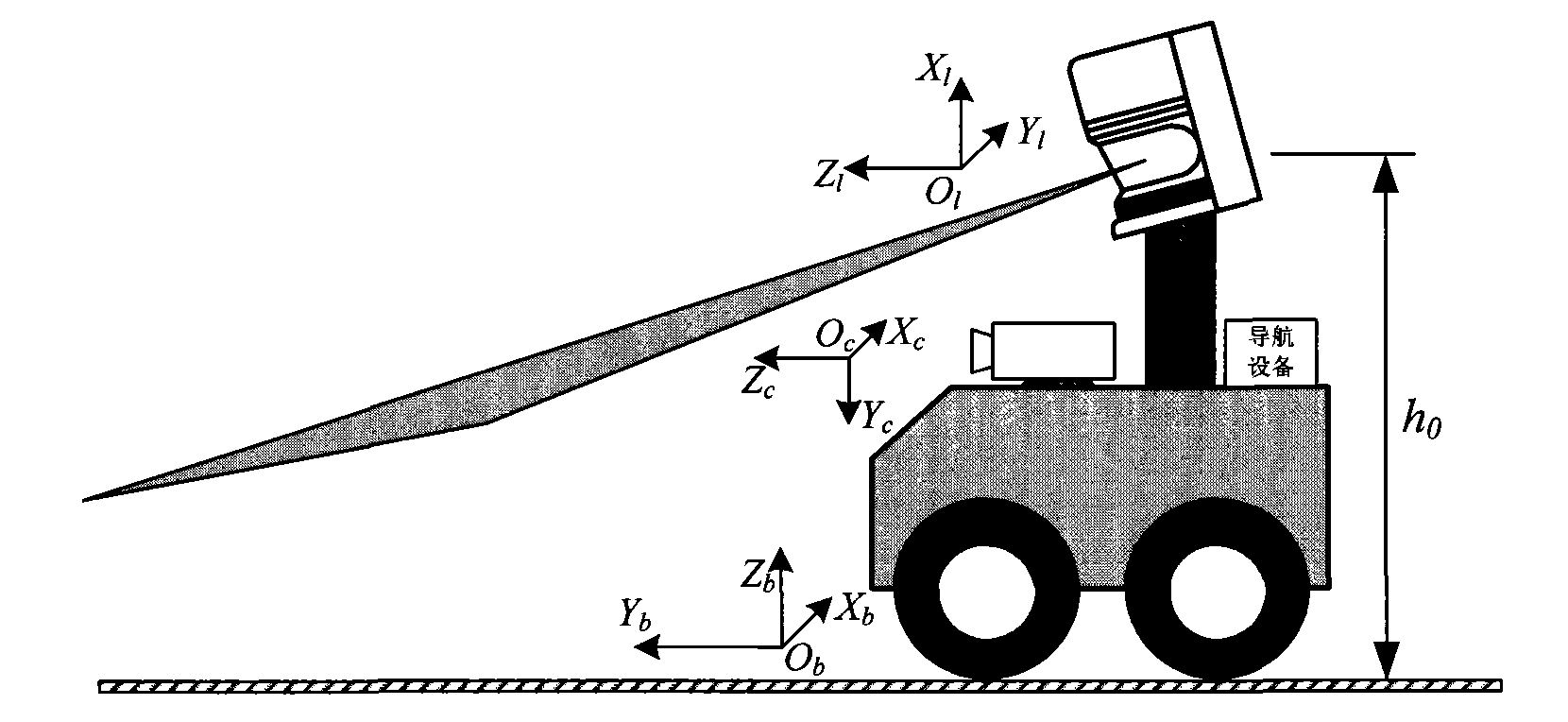
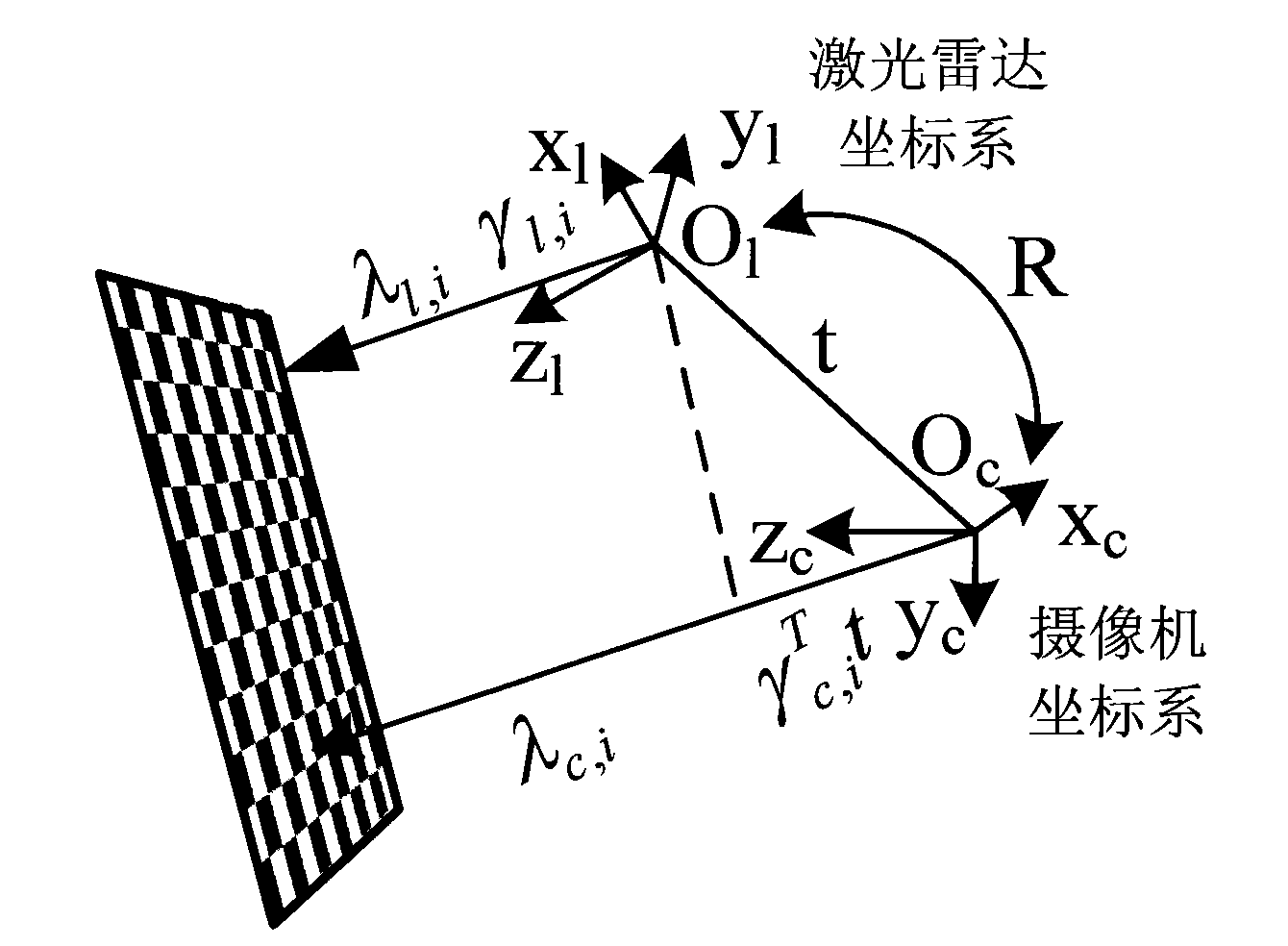
[0100] When establishing a vehicle perception model, it is necessary to establish the vehicle body, lidar, camera, and inertial navigation coordinate system, and correlate these coordinate systems with each other, including the following steps:
[0101] (1) Establish car body coordinate system O b x b Y b Z b ;
[0102] Establish a car body coordinate system that is fixedly connected with the vehicle body, and it moves with the vehicle. The body coordinate system is defined as: the origin O b Located at a fixed point on the car body, the designated origin is t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More