

Manipulator robot and associated control for fine positioning of the terminal end
An automatic device, fine positioning technology, applied in the direction of manipulator, program-controlled manipulator, mechanical equipment, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
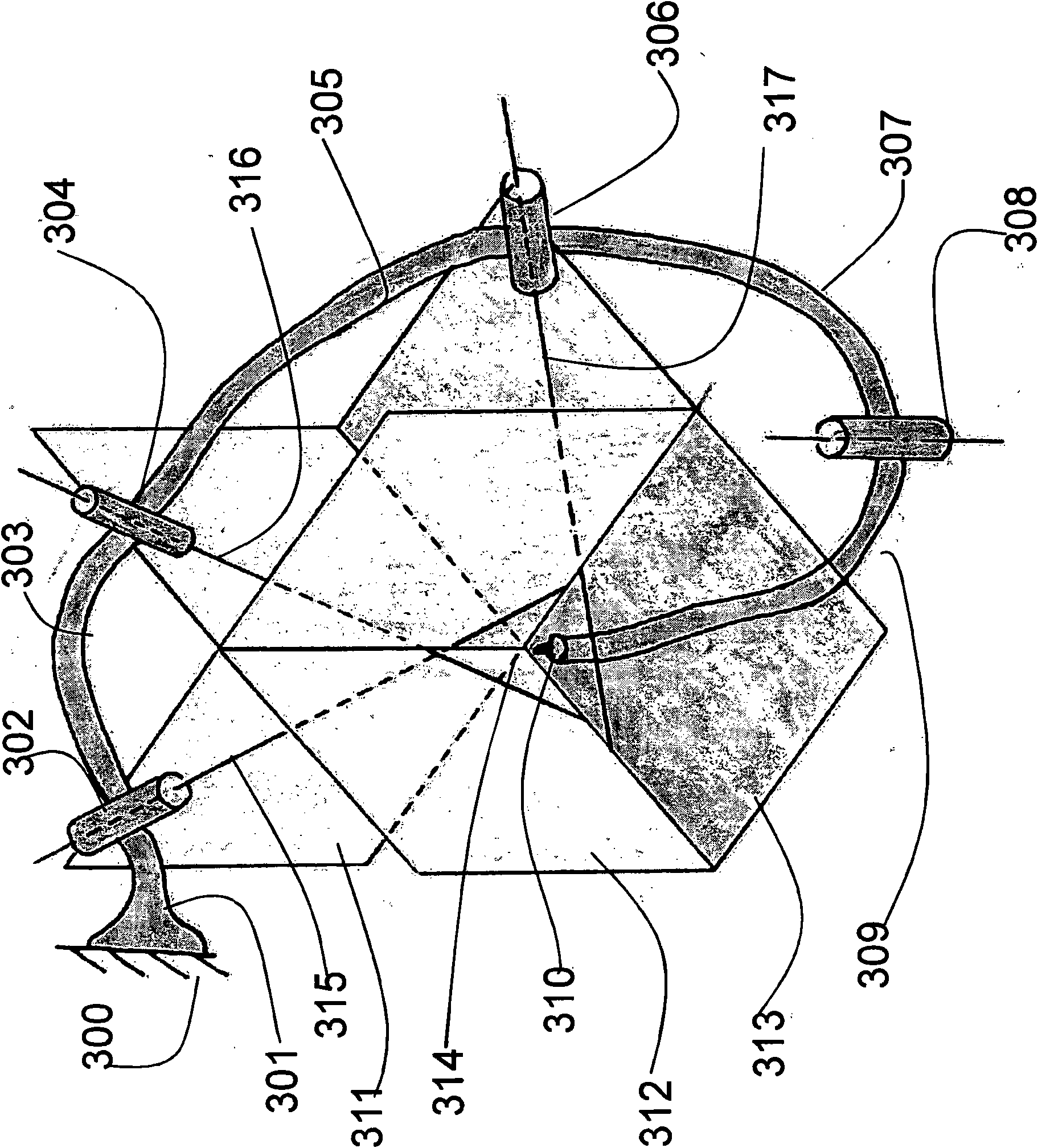
[0068] refer to image 3, for the general implementation of fine positioning in three-dimensional space, the robot structure includes three revolving joints 302, 304 and 306, also called auxiliary joints, which are connected to the frame ( ) 300, on the other hand are related to each other by kinematic chains 303 and 305, and finally to the end part 310 by the last kinematic chain. The overall kinematic chain structure of the robot has at least one additional joint (i.e. the fourth degree of robot flexibility), which belongs to the so-called main joint and enables the end of the kinematic chain to work in a lower working space than that associated only with the auxiliary joints in a larger space. A fourth joint can be inserted as required into one of the kinematic chains 301 , 303 , 305 or between 306 and 310 , here a swivel connection (liaison) 308 is involved.
[0069] The robot structure capable of fine positioning to which the present invention relates defines a so-call...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More