Haptic texture rendering method based on practical measurement
A method of expression and textured surface technology, applied in measurement devices, electrical digital data processing, special data processing applications, etc., which can solve the problems of large impact of dust measurement results and high requirements for the cleanliness of the measured surface.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] specific implementation plan
[0052] Below in conjunction with accompanying drawing, the implementation of technical scheme is described in further detail:
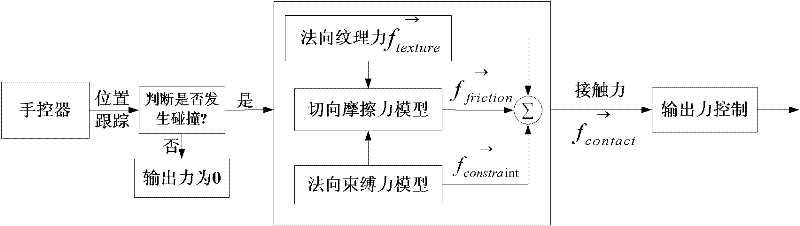
[0053] refer to figure 1 , a method for force-tactile representation based on actual measured textures, characterized by:
[0054] Manipulation force The operating handle of the tactile reproduction device approaches the virtual texture surface, and the output force before colliding with the texture surface is set to 0. After colliding with the texture surface, the normal texture force is generated normal binding force and tangential friction Finally, with the normal texture force normal binding force and tangential friction The resultant force of the contact force and with this contact force For the output force, refer to Figure 4 ,Right now
[0055] f contact → = f texture → + ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More