

Man-machine interactive type two-dimensional locating method based on human eye-glanced signal
A two-dimensional positioning and interactive technology, applied in the intersection of biomedicine and informatics, which can solve the problems of low detection accuracy, difficulty in two-dimensional accurate positioning of EOG saccade signals, and poor robustness.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
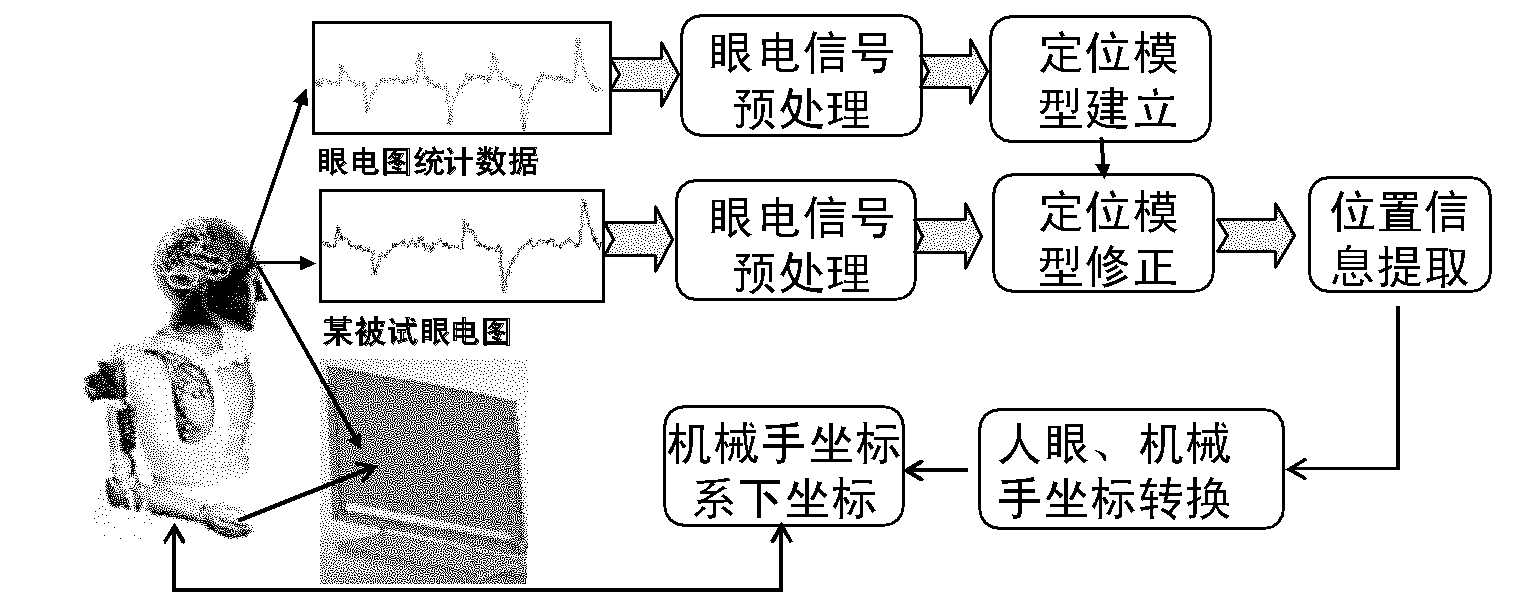
[0037] see figure 1 It can be seen from the overall technical roadmap of the present invention that the present invention is realized based on three parts, which are respectively the feature extraction of the electrooculogram signal, the establishment of the two-dimensional plane positioning model of the EOG saccade signal, and the construction of an interactive system; wherein the feature extraction of the electrooculogram signal is mainly based on the experimentally measured The scan signal is subjected to band-pass filtering, endpoint detection and other operations to eliminate noise interference, detect the scan signal waveform in real time, extract the peak value of the scan signal, and realize the online processing of the signal; after obtaining the peak value of the scan signal corresponding to different scan angles under a single experiment in real time, the The established model can be normalized and corrected according to the measured peak difference to achieve two-di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More