

Ensemble kalman filter-based particle filtering method
A Kalman filter and particle filter technology, applied in the field of nonlinear filter, can solve the problem of performance degradation of nonlinear dynamic system state estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] The present invention will be described in detail below in conjunction with the accompanying drawings.
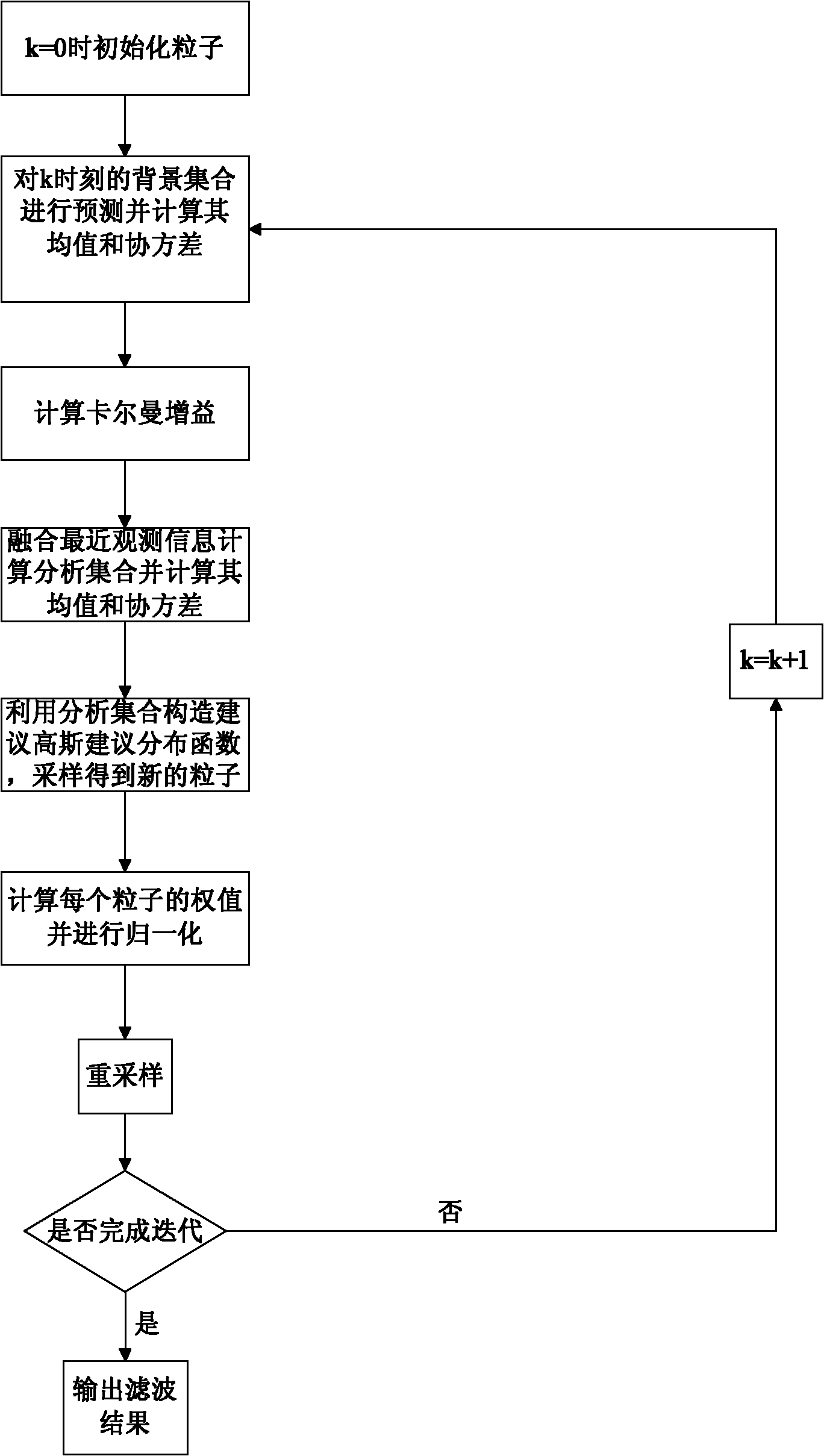
[0053] A particle filter method based on ensemble Kalman filter proposed by the present invention, such as figure 1 As shown, it mainly includes the following steps:
[0054] Step 1: Initialize the particle at k=0, using the prior probability p(x 0 ) for random sampling to obtain initial sampling particles Initialize the weight of each sampled particle as 1 / N, i represents the particle number, i=1:N, N is the number of sampled particles, k is the running time of the nonlinear system, is the state value of the i-th sampled particle at k=0. Define the initial analysis set for each sampled particle at time k=0 for in Indicates the j-th sample in the analysis set corresponding to the i-th particle at time k=0, j represents the sample number in the analysis set, Represents the Gaussian distribution with the mean value of the i-th particle state value at time ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More