

Six-degree-of-freedom parallel mechanism with measurement standard and fixed coordinate system
A technology for measuring references and coordinate systems, which is applied in the direction of measuring devices, mechanical measuring devices, and mechanical gap measurement, etc., can solve the problems of difficult to guarantee accuracy, complexity, and low repeatability of parallel mechanisms, so as to improve motion accuracy and positioning accuracy, solve Measuring the effect of the problem
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0012] The present invention will be described in further detail below in conjunction with the accompanying drawings.
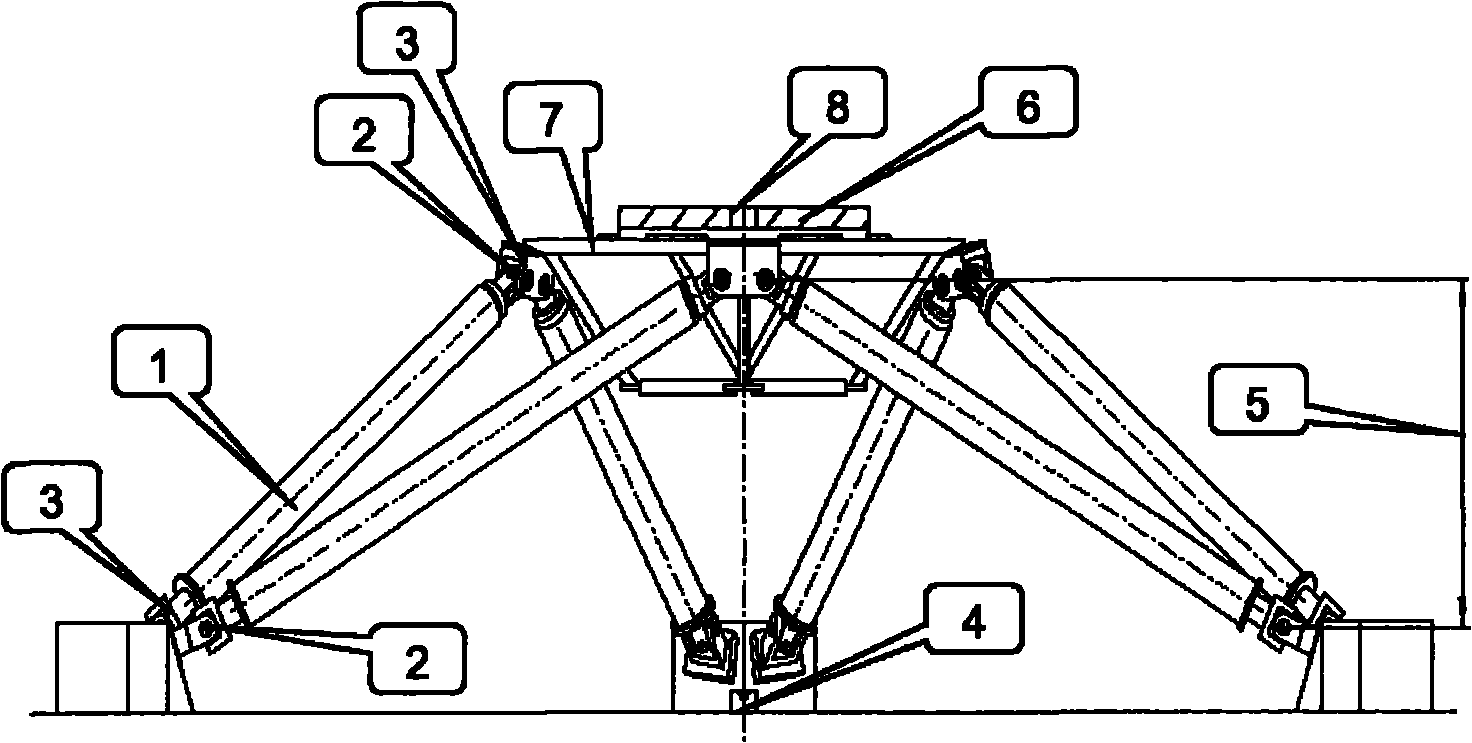
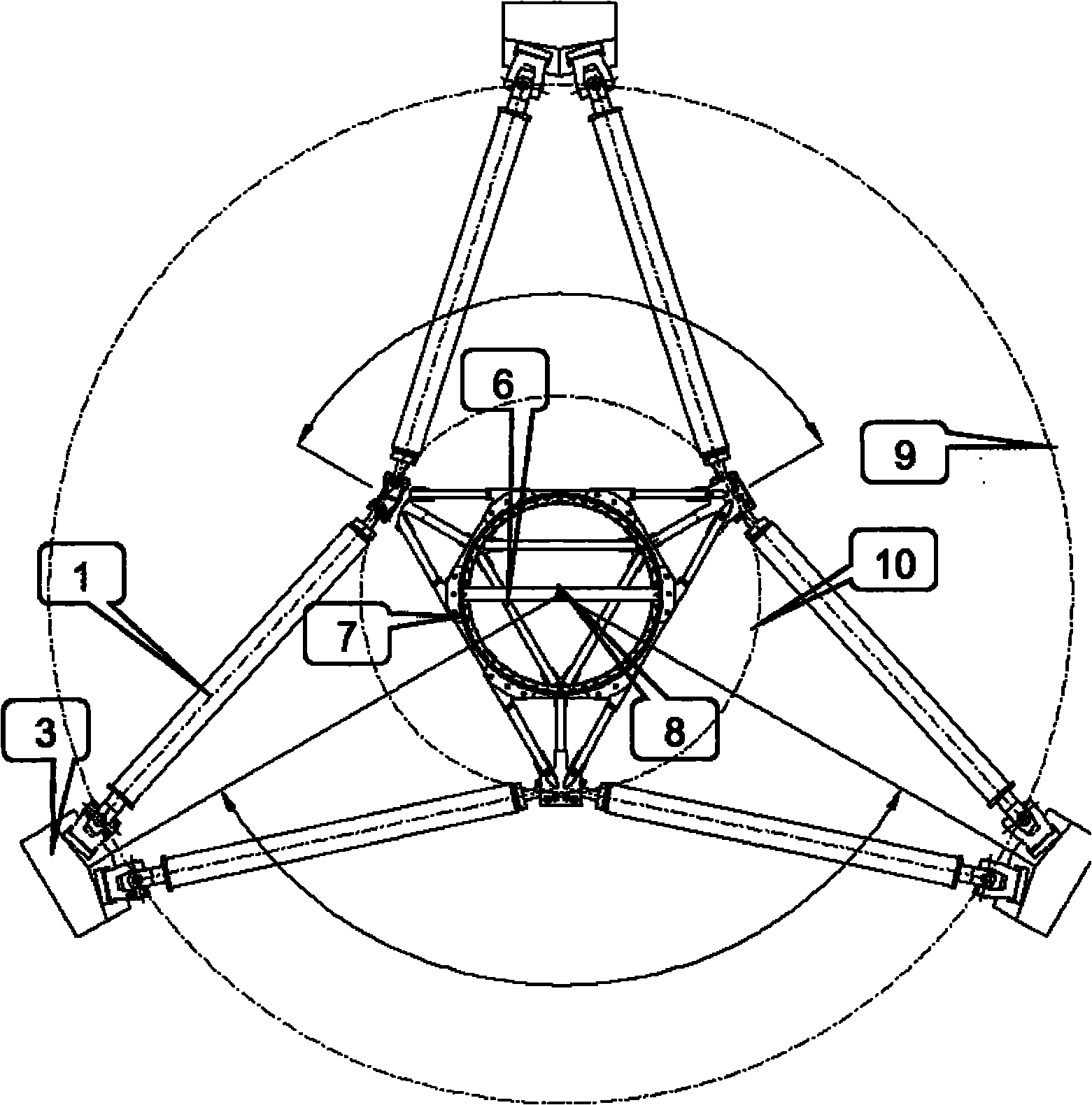
[0013] figure 1 is a structural schematic diagram of a parallel mechanism with a measurement reference in the present invention, such as figure 1 Examples of the mechanisms shown include: as figure 1 , figure 2 , is a schematic structural diagram of a six-degree-of-freedom parallel mechanism with a measurement reference and a fixed coordinate system in the present invention. In the figure, 12 Hooke hinges 2 with identical performance parameters are connected in pairs with 6 installation base plates 3, and 3 The base plate 3 on which the Hooke hinge 2 is installed is evenly distributed and connected with the motion platform 7 . 3 bottom plates 3 with Hooke hinges 2 are evenly distributed and connected to the installation foundation, cylinder barrels of 6 servo cylinders 1 with identical parameters are connected with 6 Hooke hinges 2 on the installation fou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More