

Track and posture composite control method in shield tunneling process
A composite control and composite controller technology, applied in earth-moving drilling, mining equipment, tunnels, etc., can solve the problems affecting the accuracy of the tunnel axis, difficulty in trajectory adjustment, and optimal design of the rectification path, so as to reduce the frequency of trajectory rectification and improve the Tunnel rectification efficiency and the effect of improving tunnel forming quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below in conjunction with accompanying drawing.
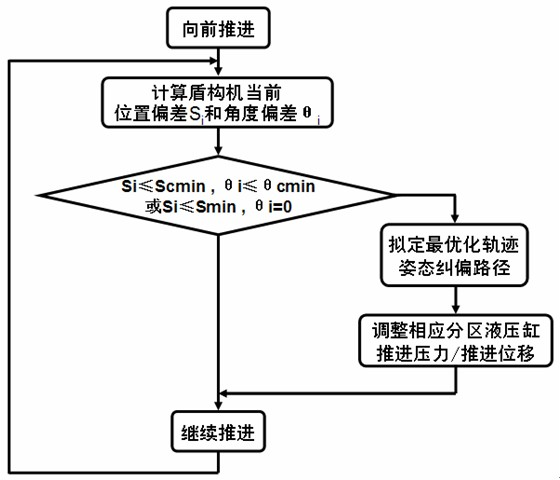
[0028] The trajectory and attitude compound control flow chart in the process of shield tunneling is attached figure 1 As shown, the present invention adopts both attitude and trajectory setting thresholds for control. Even if the trajectory has not yet reached the deviation correction threshold, as long as the attitude deviates beyond the limit, the posture adjustment will be performed in time to avoid aggravating the trajectory deviation; when the shield is moving forward , obtain the current position deviation S of the shield machine through measurement and calculation i , angle deviation θ i , if S i ≤ Position deviation threshold S of trajectory attitude composite controller cmin and θ i ≤Trajectory Attitude Composite Controller Angle Deviation Threshold θ cmin when, or S i ≤Permissible deviation S of the actual tunnel construction position min and θ i =0, the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More