

Method for grabbing object by mechanical hand based on image information
A technology of image information and manipulators, applied in the field of robotics, can solve problems such as high complexity of grasping algorithms, inaccurate positions of manipulator fingers, and object detachment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
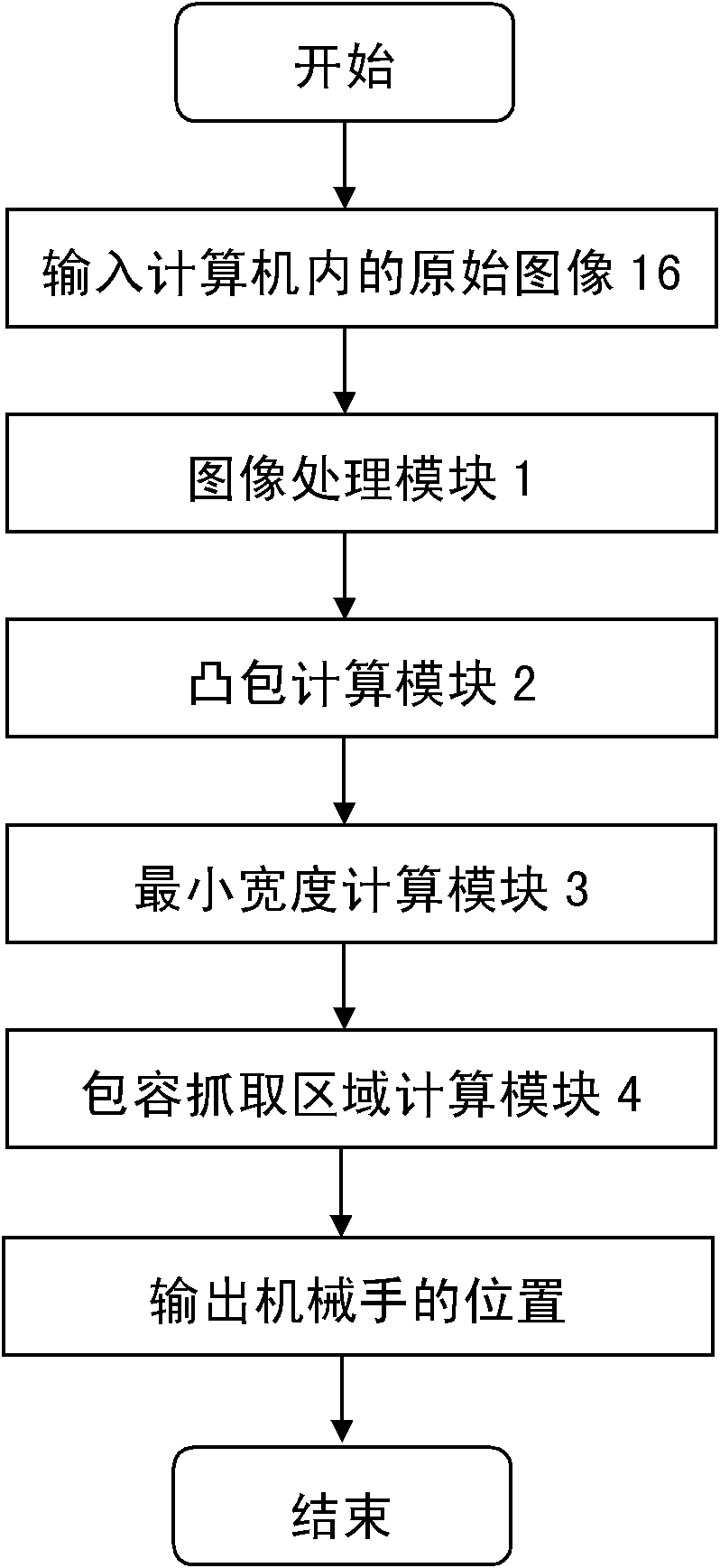
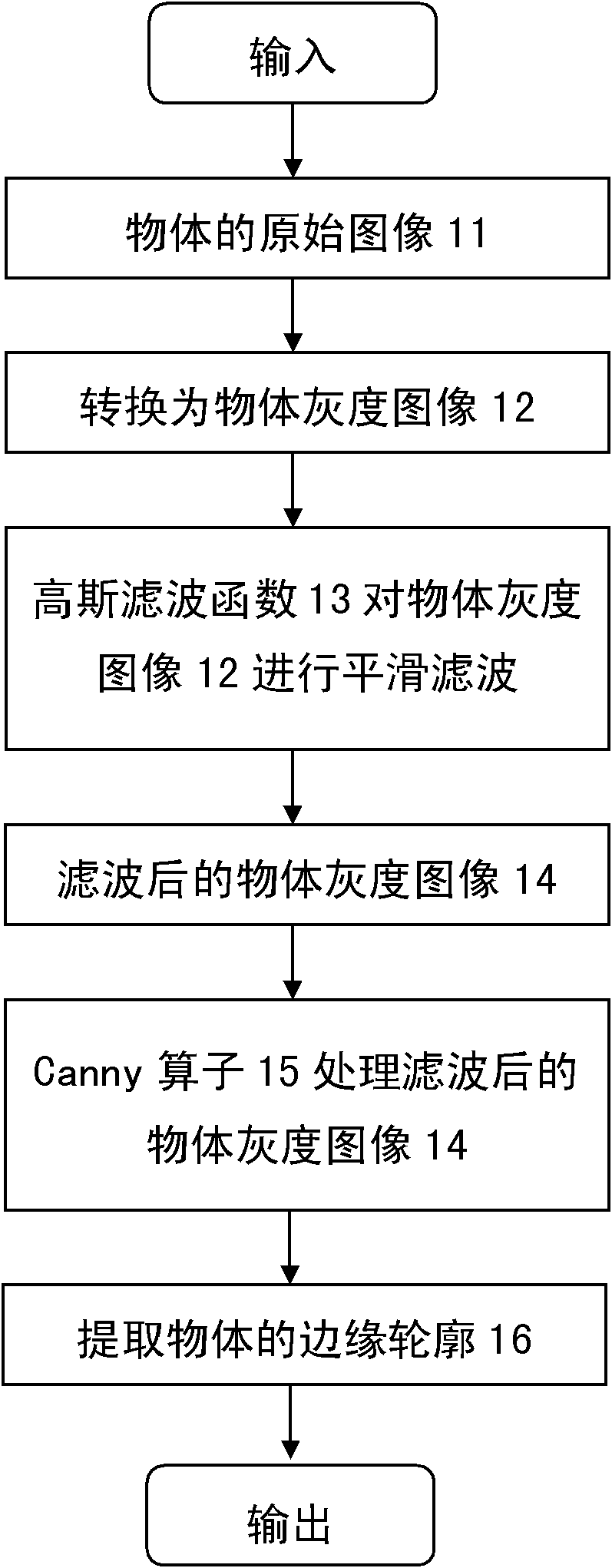
[0055] Such as figure 1 As shown, the method of quickly grasping objects by manipulators based on image information mainly uses four modules: image processing module 1, convex hull calculation module 2, minimum width calculation module 3 and contained grasping area calculation module 4. First, the image processing module 1 is used to extract the edge contour of the object from the image information; secondly, the convex hull calculation module 2 is used to fit the minimum convex polygon 21 surrounding the object contour; then, the minimum width calculation module 3 is used to calculate the minimum The minimum width of the convex polygon is 31; finally, according to the containment grasping area calculation module 4, the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More