

Continuous locus intersegment connecting speed processing method for numerical control system
A technology of connecting speed and numerical control system, applied in the direction of digital control, electrical program control, etc., can solve the problems that the feed speed does not reach the pre-calculated speed, does not take into account, and the connection speed changes suddenly.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The present invention will be further described below in conjunction with accompanying drawing.
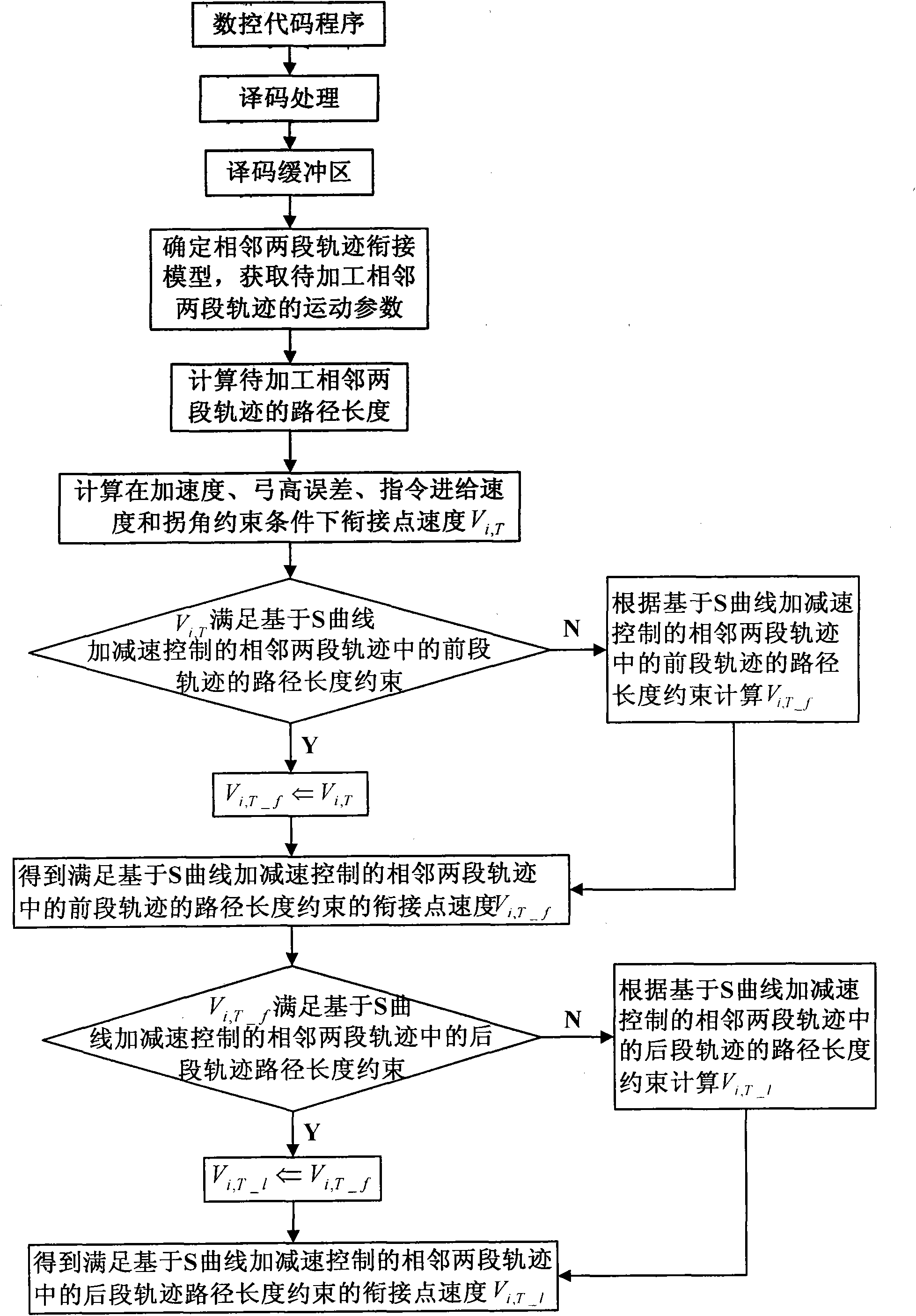
[0063] as attached figure 1 As shown in the overall flow chart of the method for processing the joint speed between continuous trajectory segments of the present invention, the numerical control system in the numerical control equipment performs decoding processing on the numerical control code program, and stores the decoding result in the decoding buffer, and utilizes the The processing of the connection speed between the continuous trajectory segments of the program segment information to be processed, the processing of the connection speed between the continuous trajectory segments includes the following steps:
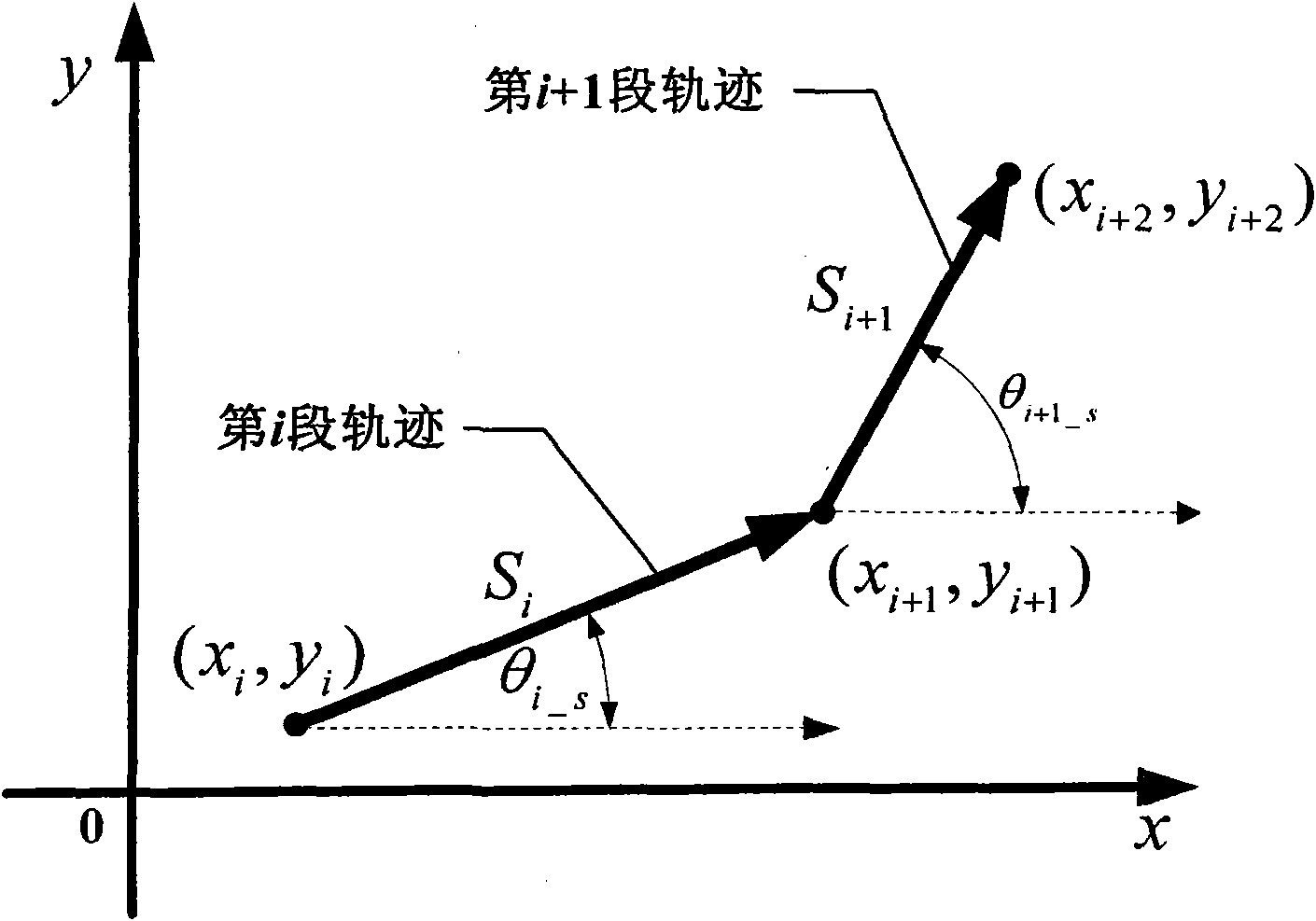
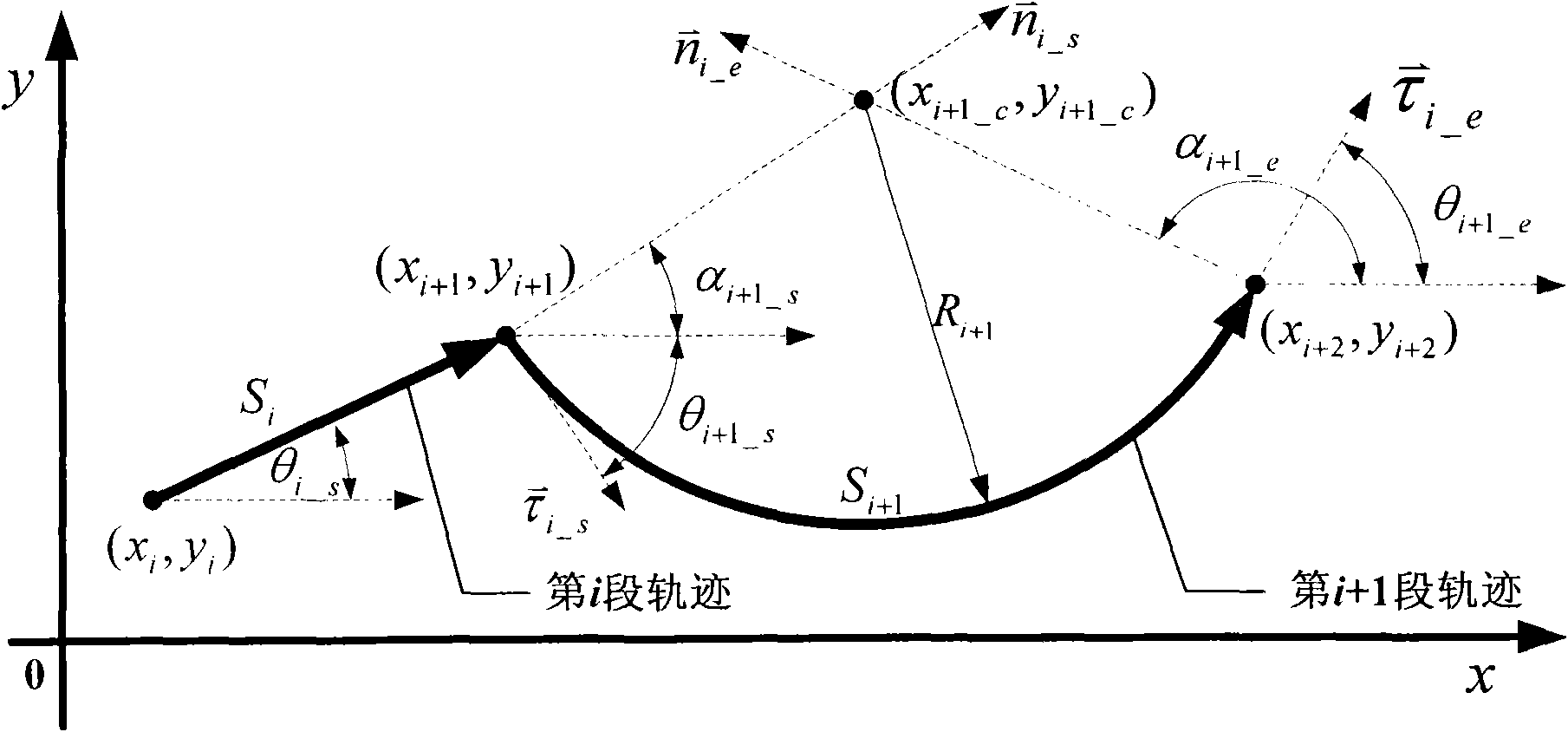
[0064] (1) Determine the connection model of two adjacent sections of trajectories, and obtain the motion parameters of the adjacent two sections of trajectories to be processed;
[0065] Adjacent two sections of trajectory cohesion models described in the pre...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More