

2-PRR&PPRR three-degree-of-freedom spatial parallel robot mechanism
A degree of freedom and robot technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as small working space, poor transmission characteristics, and complex kinematics solutions, achieve less joints in the mechanism, and improve deflection and torsional deformation , the effect of simple mechanism
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further elaborated below in conjunction with specific embodiments and illustrations.
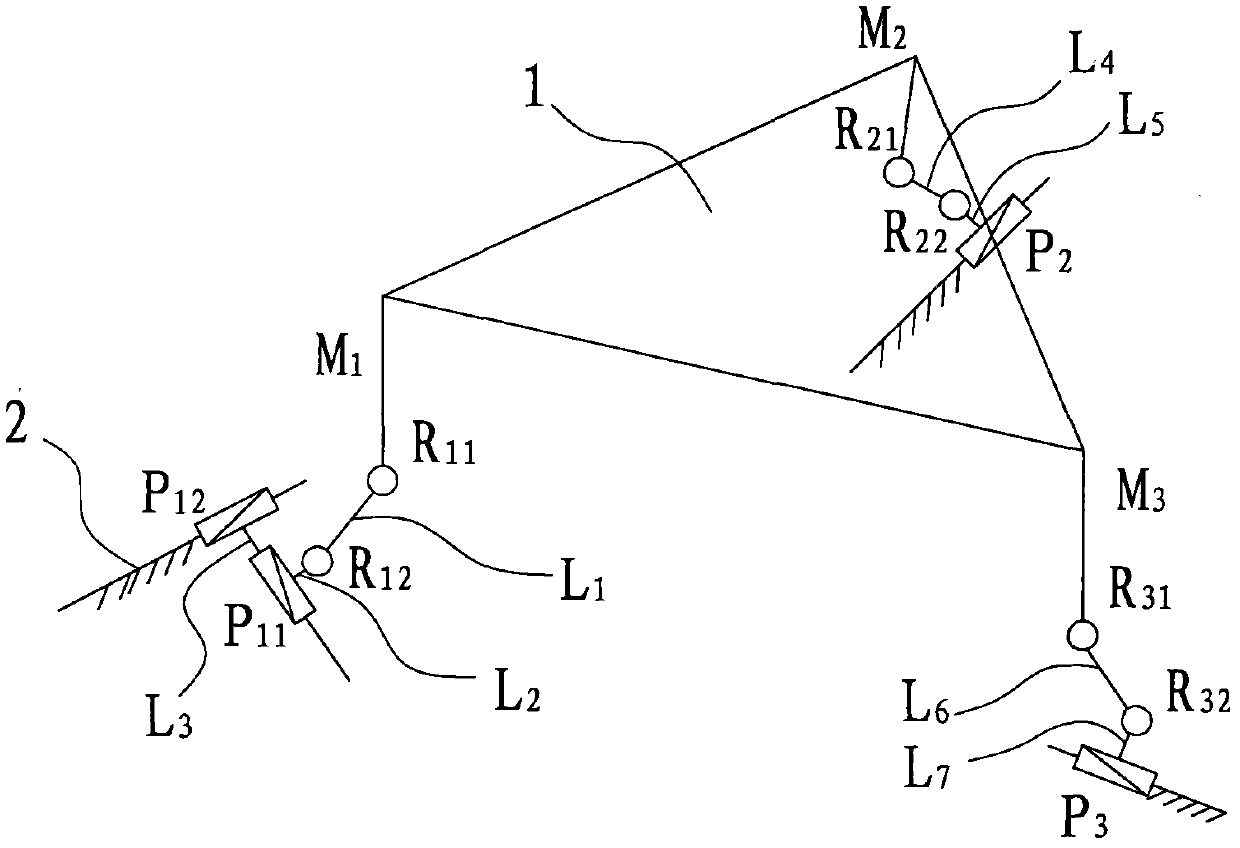
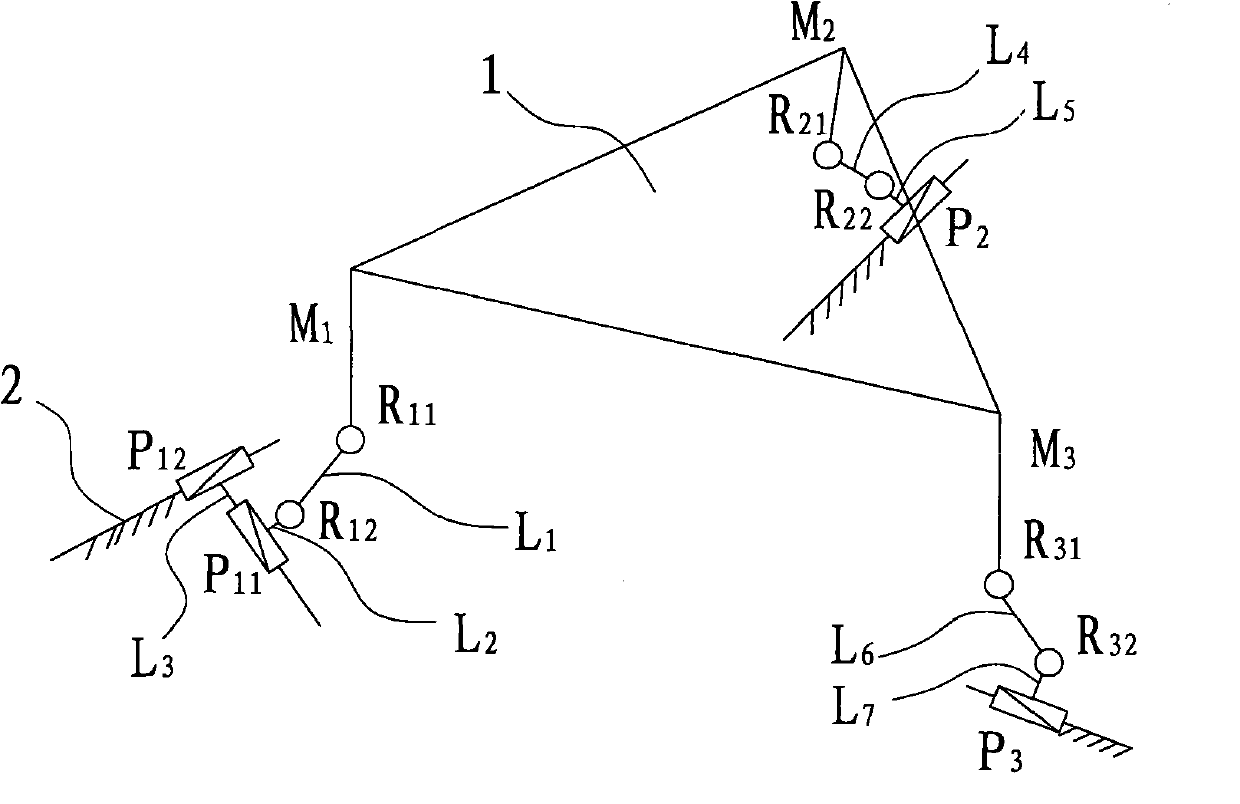
[0017] Such as figure 1 As shown, a 2-PRR&PPRR three-degree-of-freedom space parallel robot mechanism is composed of a moving platform 1, a fixed platform 2, and three branch chains connecting the above two platforms: branch chain M1, branch chain M2, and branch chain M3. Among them, the branch chain M1 is composed of two rotating pairs R11, R12, two moving pairs P11, P12 and the connecting rods L1, L2, L3 between them from top to bottom; the branch chain M2 is composed of two A rotating pair R21, R22, a moving pair P2 and connecting rods L4, L5 between them; branch chain M3 consists of two rotating pairs R31, R32, a moving pair P3 and the connection between them from top to bottom. Composed of rods L6 and L7. The connecting r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More