

Guide-arm-type front-wheel joint mechanism of mobile robot
A mobile robot and guide arm technology, which is applied in motor vehicles, transportation and packaging, etc., can solve the problems of low energy consumption, speed limit, and fast moving speed of wheeled mechanisms, and achieve strong anti-interference ability, sensitive action, and simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
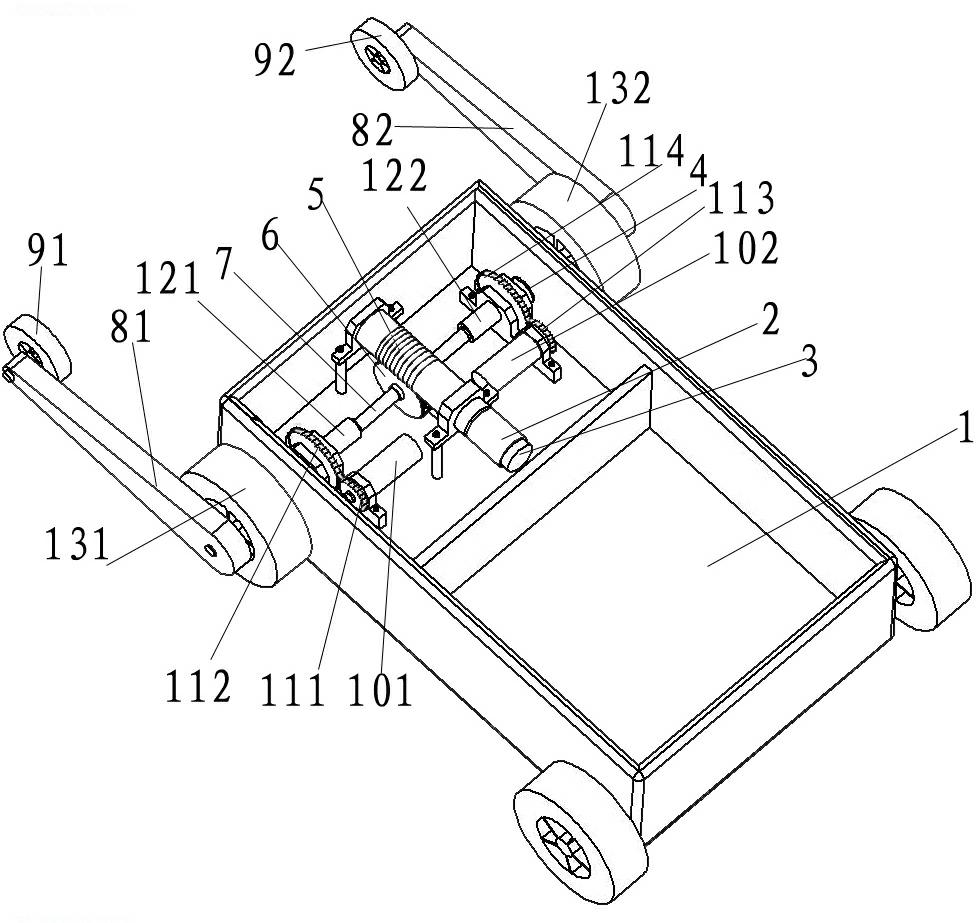
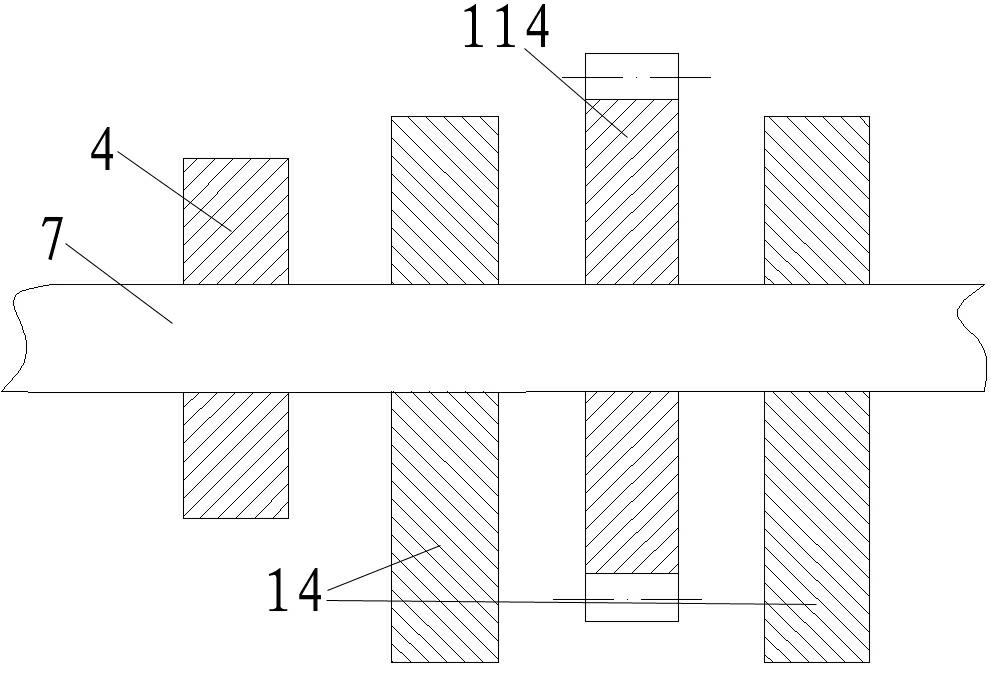
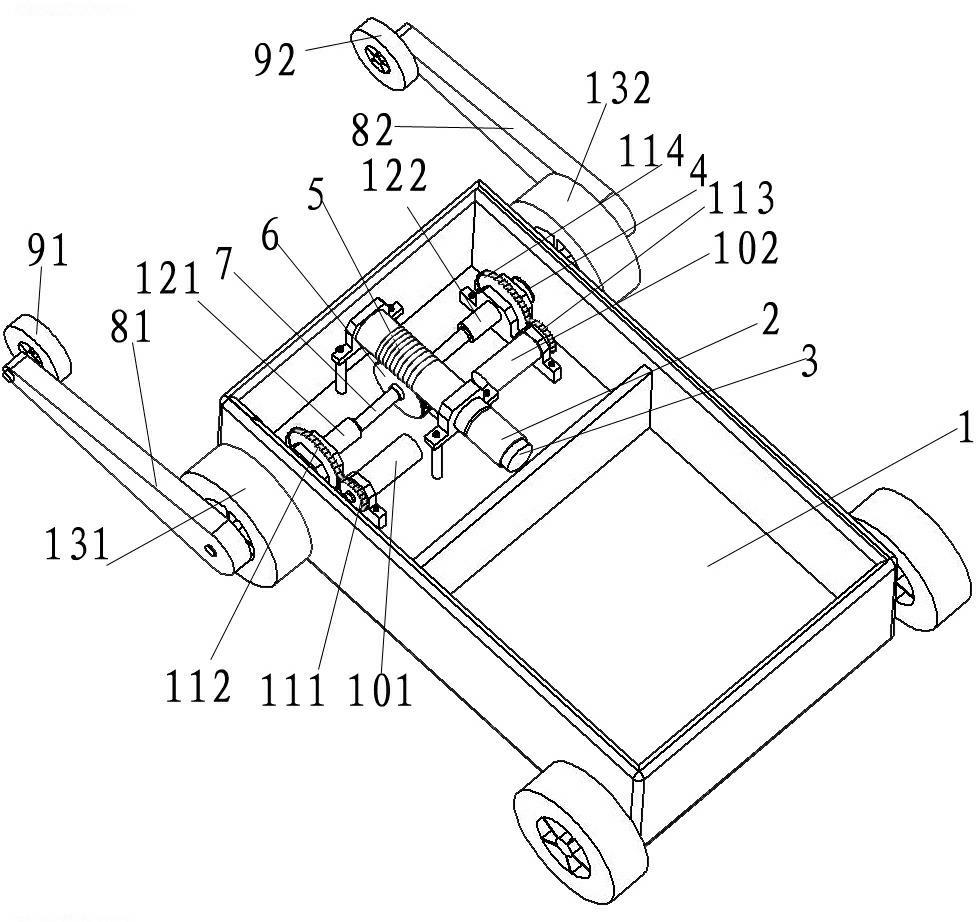
[0015] A guide arm type front wheel joint mechanism of a mobile robot, comprising a first motor 2, a worm gear 6, a worm screw 5, a resolver 3, a torque sensor 4, a guide arm shaft 7, a first guide arm 81 and a second guide arm 82, The second motor 101, the first gear 111 and the second gear 112, the first hollow shaft 121 and the second hollow shaft 122, the first driving wheel 131 and the second driving wheel 132, the third motor 102, the third gear 113 and the first driving wheel 132 Four gears 114 , the first follower wheel 91 and the second follower wheel 92 . The resolver 3 is mounted on the rear end of the first motor 2, the output shaft of the first motor 2 is in transmission connection with the worm 5, the worm gear 6 is in transmission connection with the guide arm shaft 7, the torque sensor 4 is mounted on the guide arm shaft 7, and the first guide arm 81 Fixed on the left end of the guide arm shaft 7, the second guide arm 82 is fixed on the right end of the guide a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More