

Self-adaptive path control method of mobile robot
A mobile robot and path control technology, applied in the field of mobile robots, can solve the problems of no cruising path, increased cost, poor environmental adaptability, etc., to achieve the effect of low implementation cost, convenient operation and strong environmental ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The adaptive path control method of the mobile robot of the present invention will be further described in detail below in conjunction with the specific embodiments and with reference to the accompanying drawings.
[0037] Please refer to Figure 1 to Figure 11 , which is a preferred embodiment of the present invention.
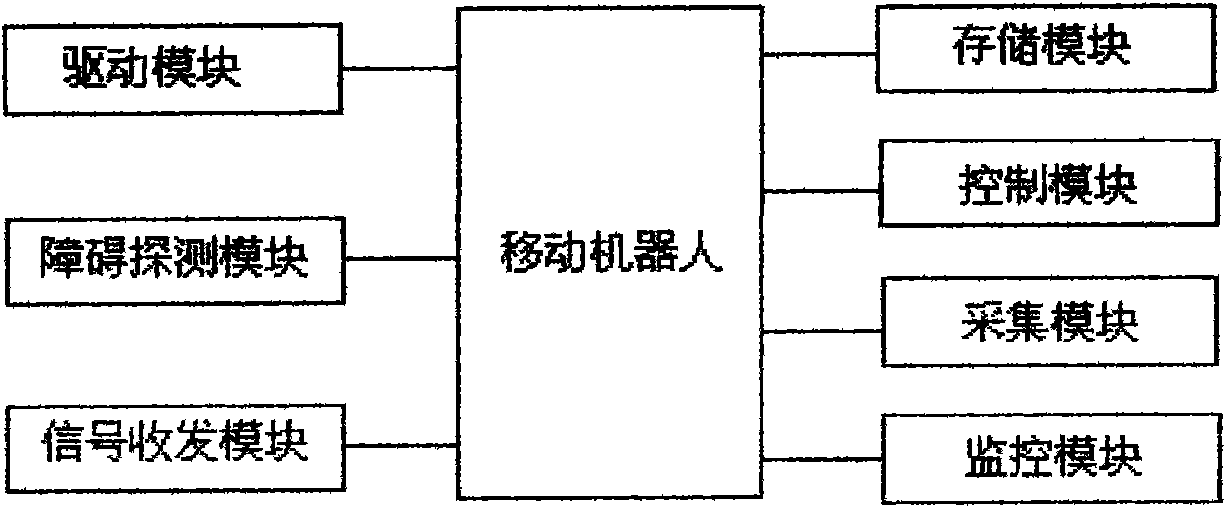
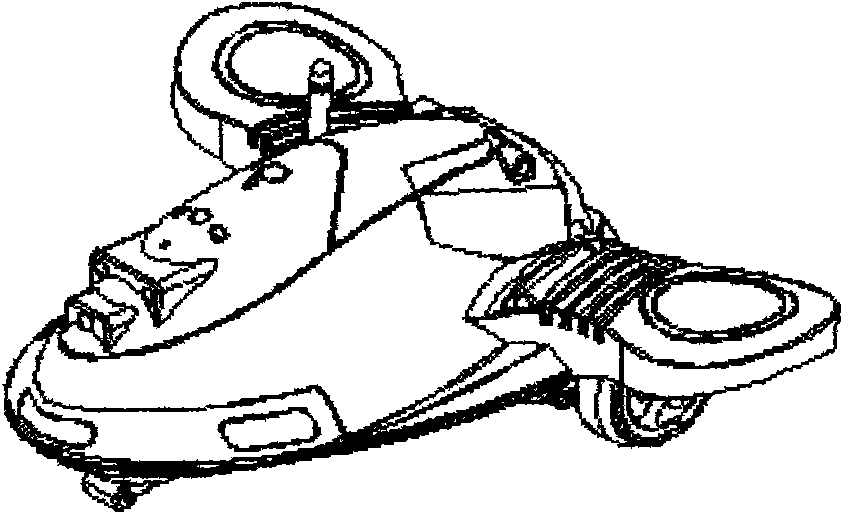
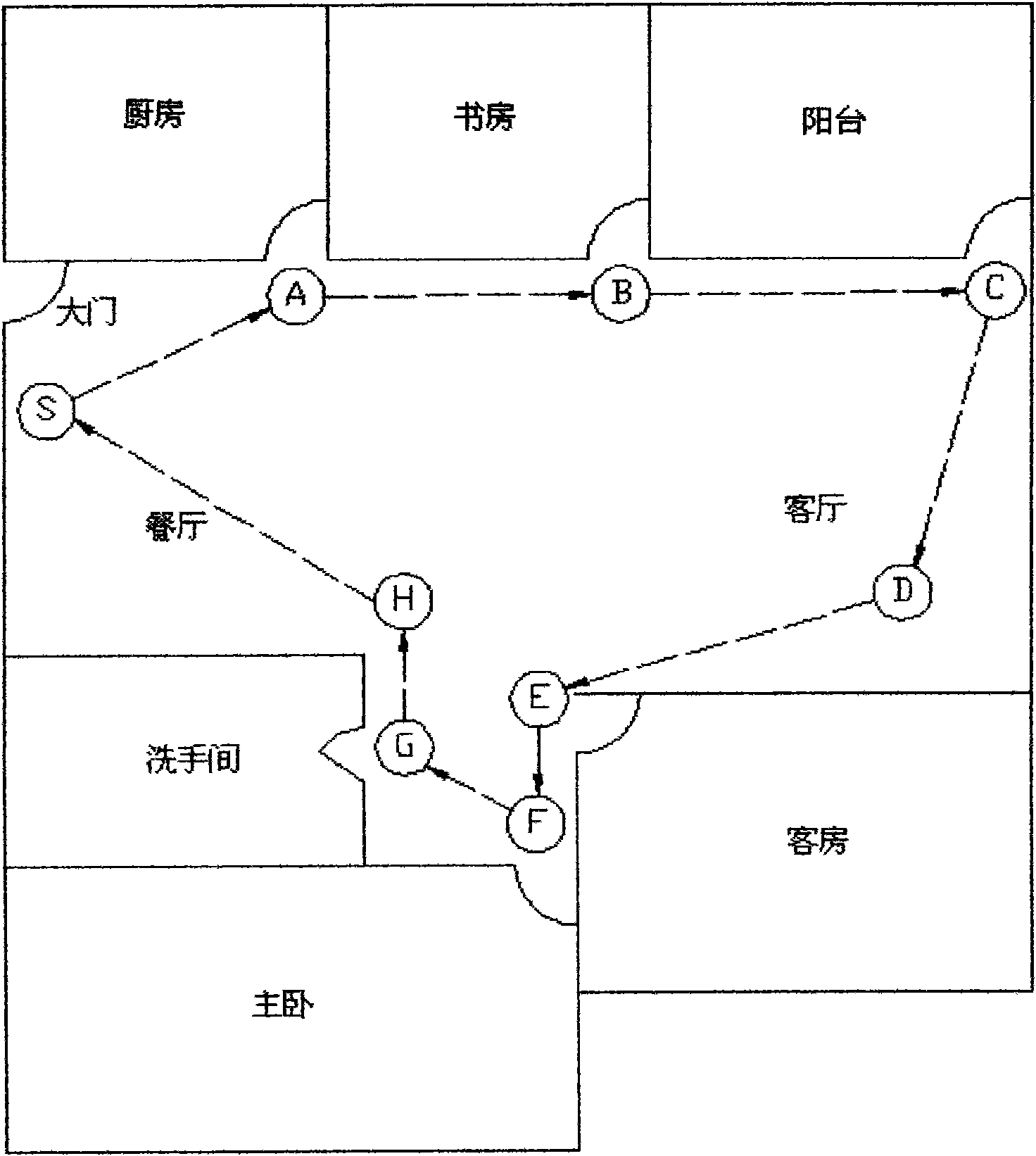
[0038] This embodiment is described by taking a home monitoring robot as an example, and the system using the method of the present invention includes a mobile robot ( figure 2 ), charging stand S, road sign locator A-H and remote control, such as figure 1 As shown, the mobile robot includes a motion module, a monitoring module, a signal transceiver module, an obstacle detection module, a collection module, a storage module, and a control module, and the charging base S is used as a road sign locator when the mobile robot is not charged. The signal strength is greater than the signal strength of the road sign locator A-H. The charging base S and roa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More