

Method for acquiring ball-hitting gesture and ball-hitting speed of ping-pong robot racket
A table tennis and robot technology, applied in the field of robot control, can solve the problems of poor return ball quality, scattered landing points, difficult training, etc., and achieve the effect of easy control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
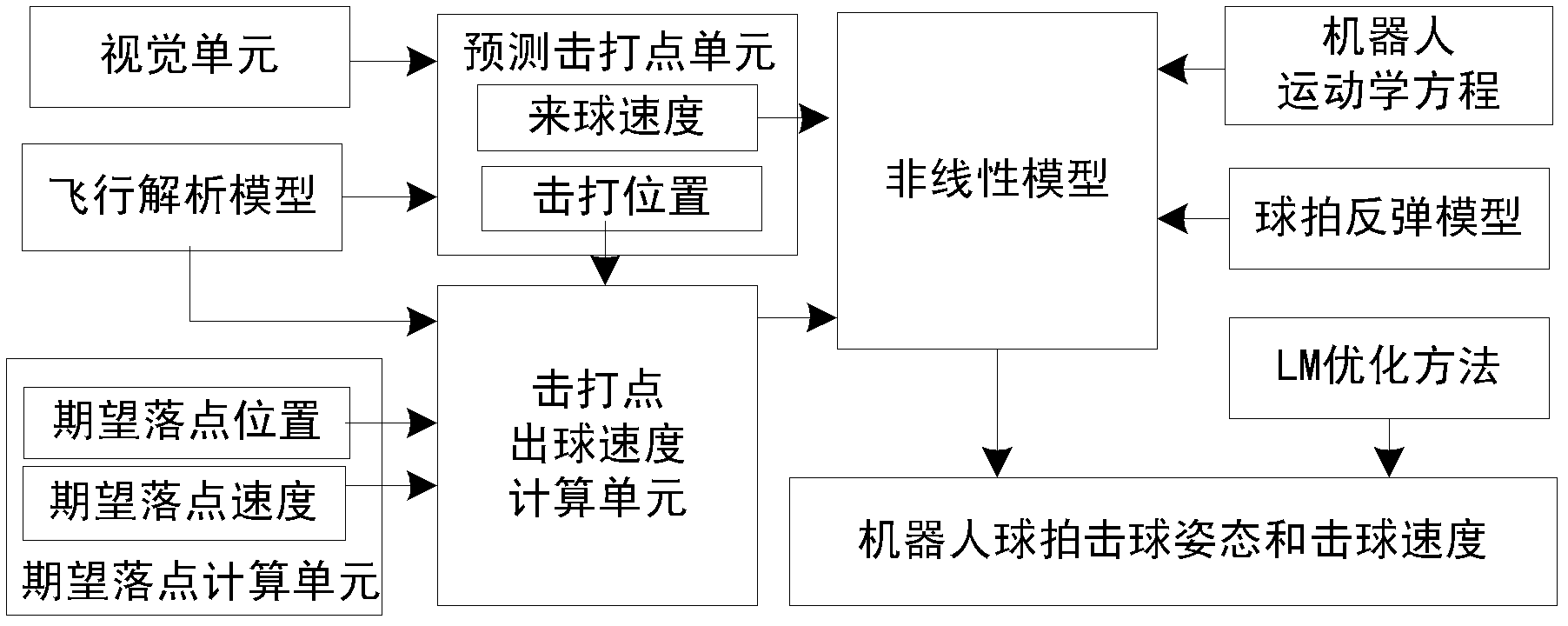
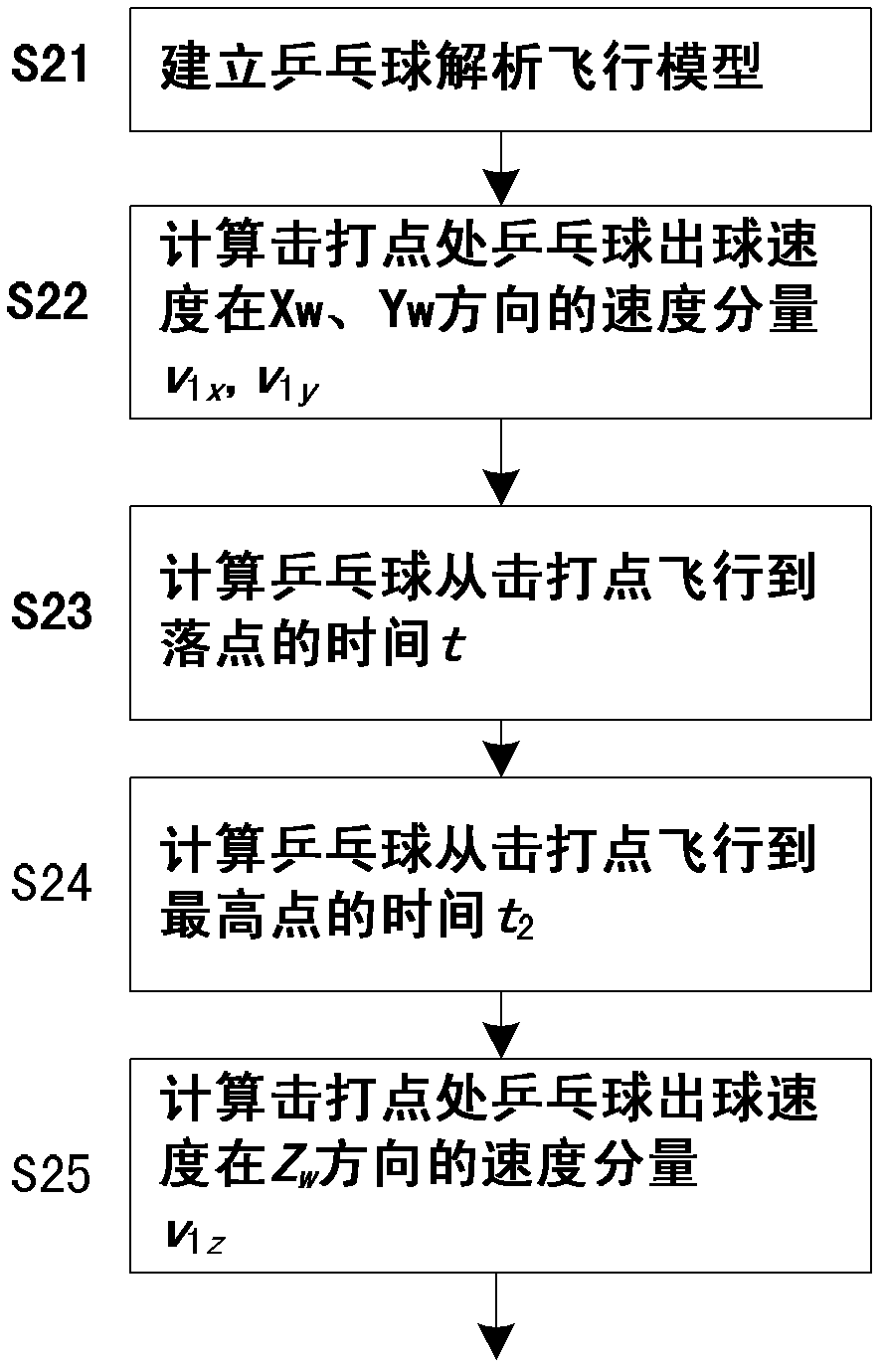
[0027] Fig. 1 shows the method flowchart that the present invention obtains table tennis robot racket batting posture and batting speed, the present invention has set up the analytical model of table tennis flight, utilizes this model to return the ball according to the expected hitting point position and prediction , combined with the expected return speed of the ball, the expected speed of the ball after the robot racket hits the ball can be calculated. According to the table tennis speed before and after the racket hits the ball, combined with the rebound model of the racket and the kinematics model of the five-degree-of-freedom table tennis playing robot, a set of nonlinear equations including the racket hitting postur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More