

Fire-fighting robot arm double-coupling simulation method
A technology of fire-fighting robot and simulation method, which is applied in the direction of instruments, special data processing applications, electrical digital data processing, etc. It can solve the problems of many circuit components, not suitable for direct modeling and simulation, complex structure, etc., so as to achieve easy overall grasp and shorten Design cycle, effect of improving simulation efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
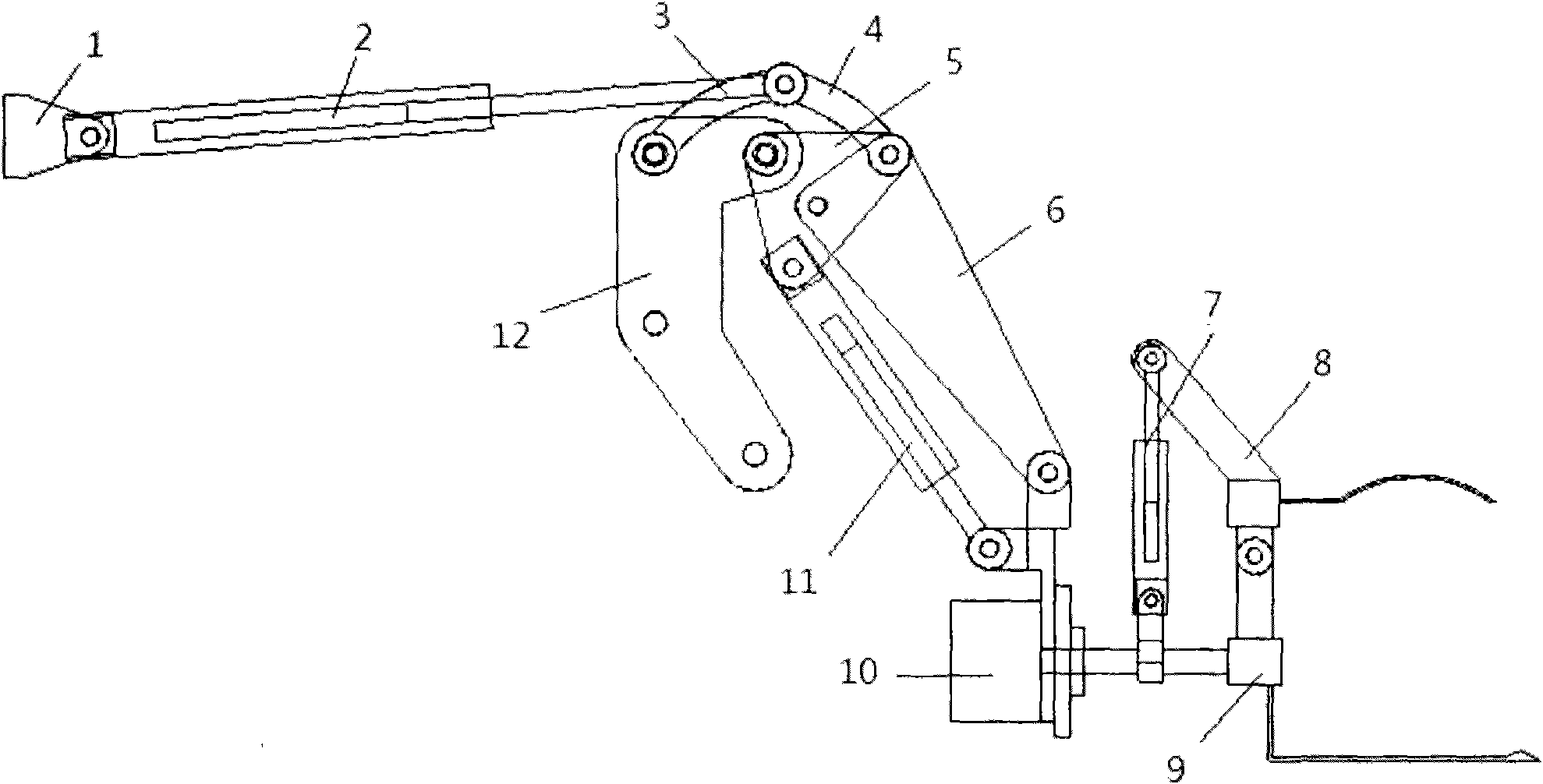
[0028] 1-base; 2-big arm cylinder group; 3-long connecting rod; 4-short connecting rod; 5-triangular connecting rod; 6-small arm; 7-claw cylinder group; 10-motor group; 11-arm cylinder group; 12-big arm.
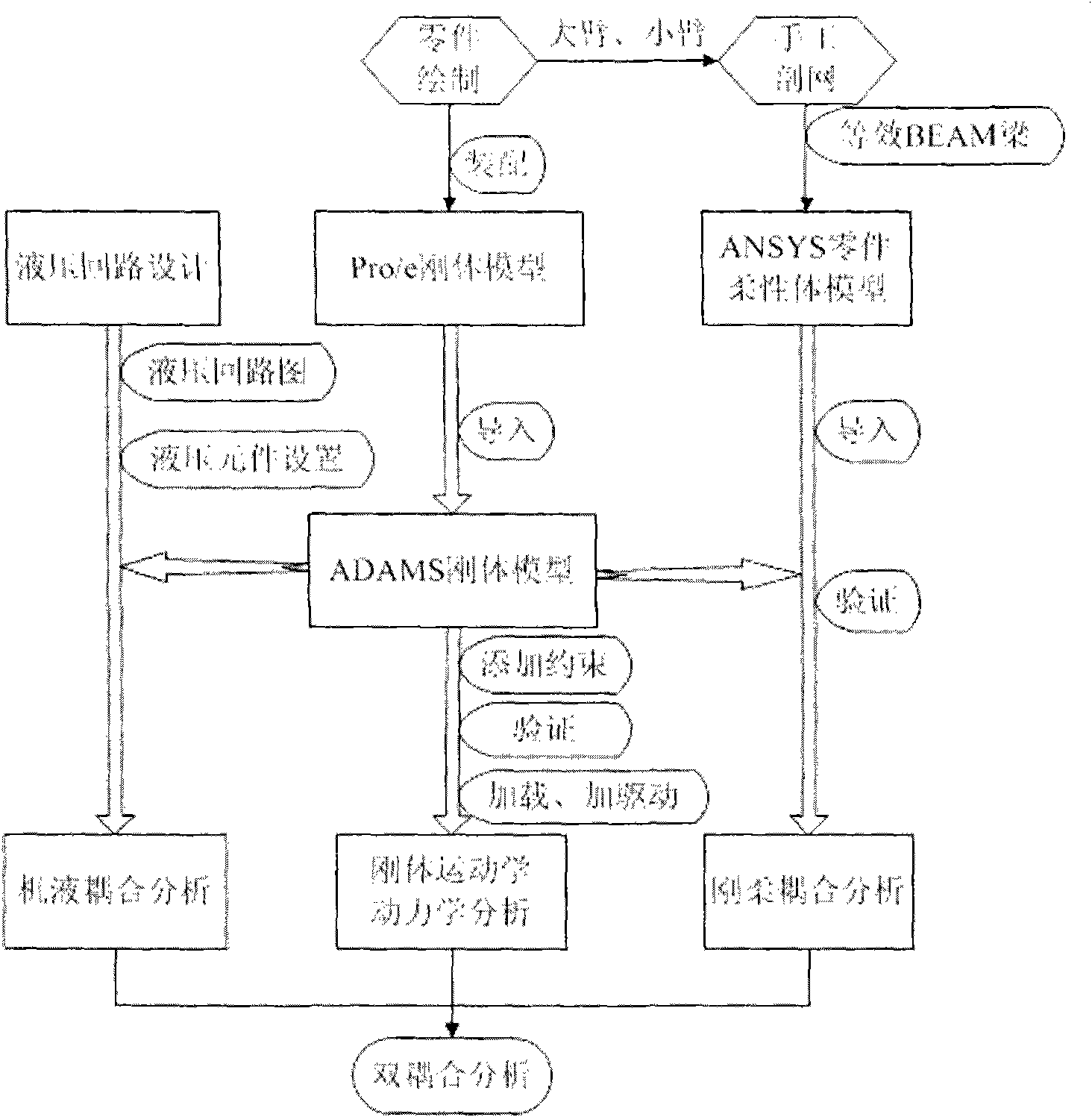
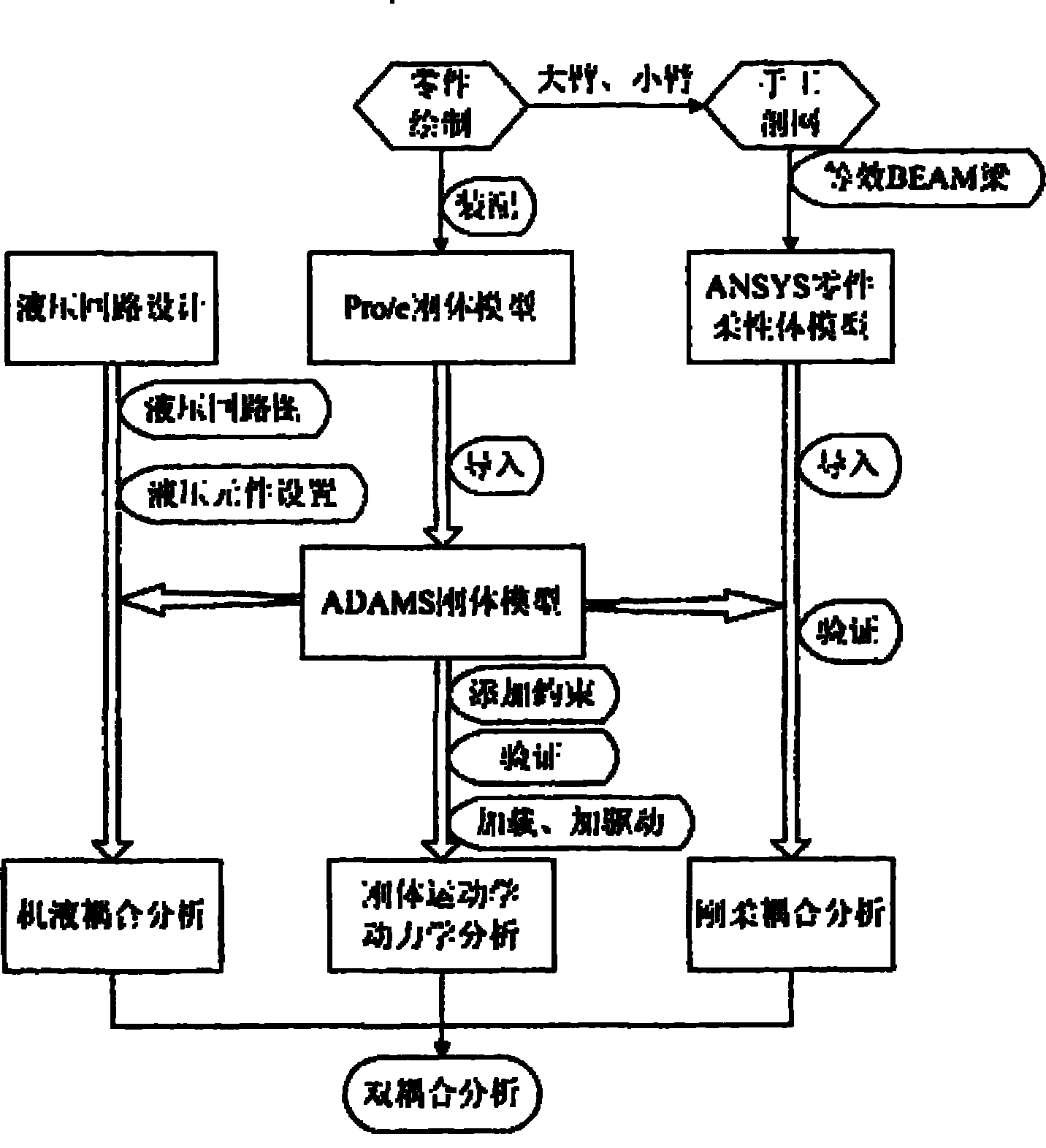
[0029] Such as figure 1 As shown, the fire-fighting robot arm dual-coupling simulation method of the present invention includes hydraulic circuit design, Pro / e rigid body modeling, ANSYS flexible body modeling, kinematics dynamics simulation, machine-hydraulic coupling simulation, rigid-flexible coupling simulation, dual coupling Analysis, the hydraulic circuit design is the hydraulic circuit design of three groups of hydraulic cylinders of the mechanical arm, including the drawing of the hydraulic circuit diagram and the setting of the hydraulic components. The rigid body model is the modeling and assembly of all rigid body parts, which are imported into the virtual The rigid-flexible coupling model can be formed with the flexible body model in the prototype software ADAMS...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More