Two-degree-of-freedom spatial parallel mechanism for realizing one-dimensional rotation and one-dimensional movement
A technology with a degree of freedom and space, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve the effect of large working space, simple mechanism structure and small number
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
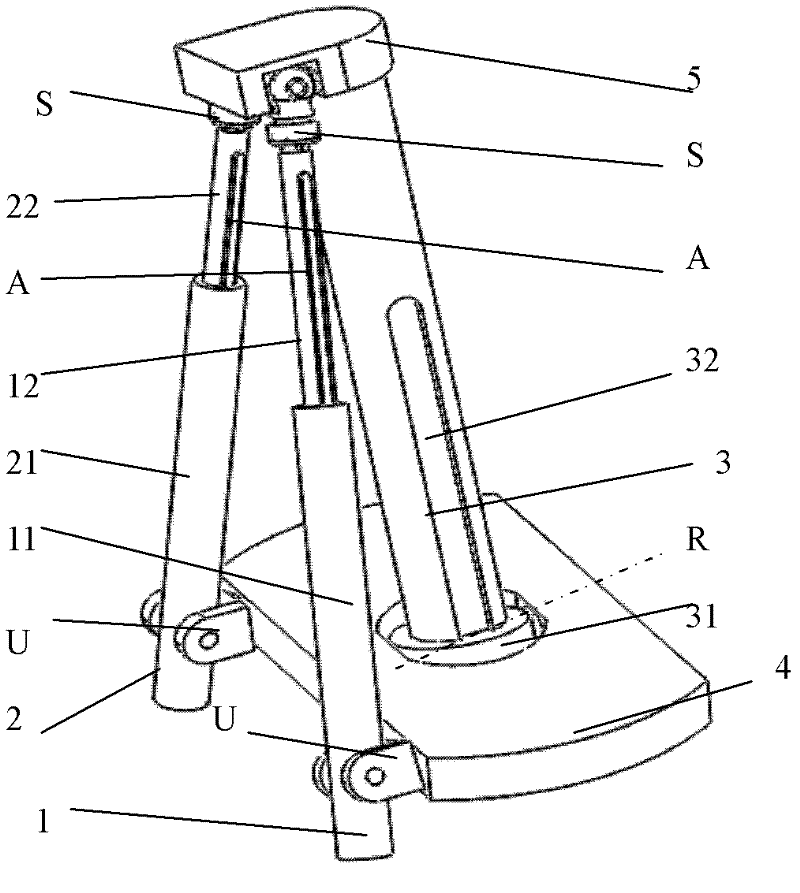
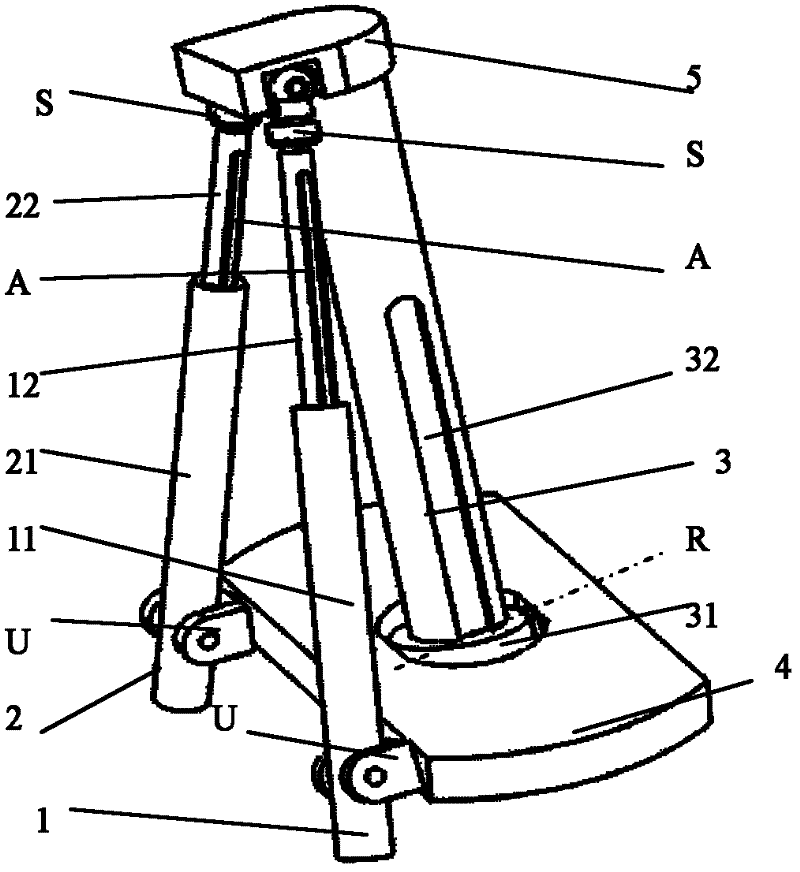
[0019] The two-degree-of-freedom space parallel mechanism of the present invention will be further described in detail below with reference to the drawings and embodiments.
[0020] The two-degree-of-freedom space parallel mechanism for realizing one-dimensional rotation and one-dimensional movement of the present invention includes a fixed platform (4), a moving platform (5) and three branch chains connecting the two platforms. The lower connecting rod (11) in the first branch chain is connected to the fixed platform through a universal hinge (U), the first axis of the universal hinge is in the plane of the fixed platform and perpendicular to the end face of the fixed platform, and the lower connecting rod The other end of (11) is connected with the upper link (12) through the moving pair; the upper link (12) is connected with the moving platform through the ball pair, and the ball pair is replaced by three equivalent rotating pairs. Along the axis of the upper link, one axis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More