

Method and related equipment for acquiring movement attitude data and tracking human movement attitude
A technology of human motion and motion attitude, applied in the field of micro-mechanics, can solve the problems of inability to track moving objects accurately, the heading angle data does not match the actual value, etc. Effects of corner data
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
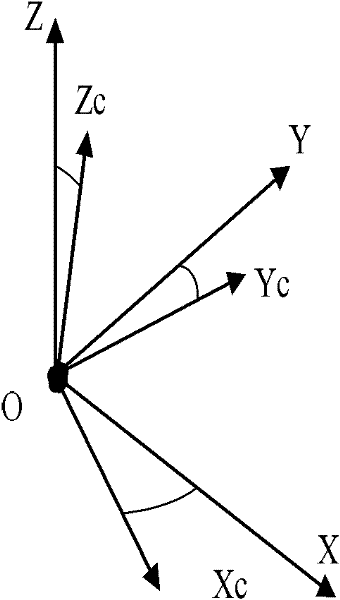
[0070] Realization of moving object tracking needs to know the parameter description of the posture of the moving object (that is, the position of the moving object in the reference space). The posture of the moving object is usually through the motion reference coordinate system OX fixed to the moving object C Y C Z C Represents the angle between OXYZ and the fixed reference coordinate system. The origin of the two coordinate systems is taken at the center of mass of the moving object. The X axis of the fixed reference coordinate system points to east horizontally, the Y axis points to north horizontally, and the Z axis points to the zenith perpendicular to the ground; the X of the motion reference coordinate system fixed to the moving object C The direction of the vertical moving object points to the right, Y C The axis points forward along the direction of motion of the moving object, Z C Point upward along the longitudinal axis of the moving object. The relationship between ...
Embodiment 2
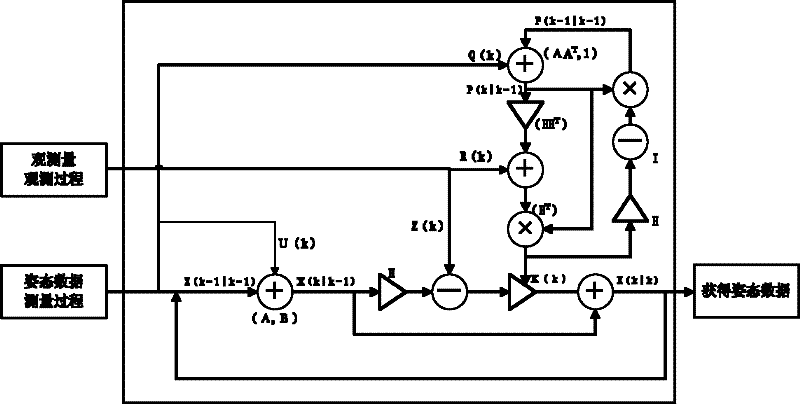
[0082] The data fusion process of recursive autoregressive filtering is mentioned in step 104 of the foregoing embodiment. In fact, there are many specific implementations of recursive autoregressive filtering between the posture data of the moving object and the magnetic field intensity data. The present invention preferably adopts Kalman filtering. The algorithm implements this process. See attached image 3 , The data fusion process of Kalman filtering method is:
[0083] The attitude parameter of the moving object M at k-1 time is represented by a quaternion, which uses a super-complex number to equivalently rotate the reaction vector. Any vector can be expressed as a quaternion composed of a real part and a complex number, such as: (Where w is a constant), the parameters in this formula satisfy the following relationship:
[0084] q=[w x y z] 2
[0085] |q| 2 =w 2 +x 2 +y 2 +z 2 = 1
[0086] The basic data of the quaternion structure of the posture of the moving object comes f...
Embodiment 3
[0095] In the above embodiment, the description of the posture parameter of the moving object in the state variable uses a quaternion notation. In fact, Euler angles can be used directly for the attitude parameters of a moving object, or even other representation methods. Different representation methods are only different in form, and these representation methods can be mutually converted through mathematical rules. The conversion formula between quaternion and Euler angle is given below.
[0096] Conversion formula from quaternion to Euler angle:
[0097]
[0098] The result of arctan and arcsin in the above formula is For other angles, use atan2 instead of arctan. That is, use the following formula to achieve the conversion:
[0099]
[0100] Euler angle to quaternion conversion formula:
[0101]
[0102] Therefore, the present invention does not limit the specific mathematical form of the description of the posture of the moving object, as long as it does not prevent the presen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More