

Walking type under-actuated three-degree of freedom ankle joint movement recovery exoskeleton
A technology for sports rehabilitation and ankle joints, applied in passive exercise equipment, medical science, prostheses, etc., can solve the problems of the number of rehabilitation effects and experience limitations, and achieve the effects of sports rehabilitation, enhanced walking ability, and convenient use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] Further illustrate the present invention below in conjunction with accompanying drawing.
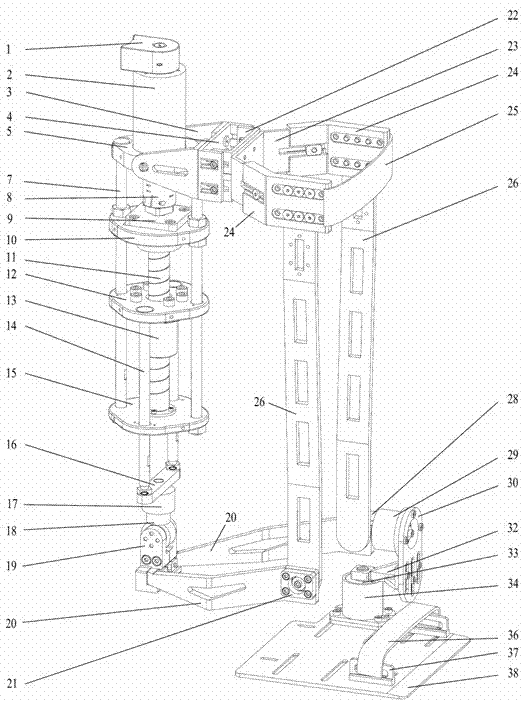
[0018] refer to figure 1 , the walking underactuated three-degree-of-freedom ankle joint motion rehabilitation exoskeleton of the present invention includes a driving mechanism, a calf fixing mechanism, a three-degree-of-freedom ankle joint mechanism and a plantar support:
[0019] The driving mechanism includes a linear transmission part composed of an encoder 1, a DC servo motor 2, a shaft coupling 8, a lead screw 11 and a lead screw nut 13, and consists of a motor fixing seat 5, a long axis 7, a screw fixing side support 9, The supporting frame part composed of the bearing fixing part 10, the nut fixing part 12 and the supporting side bearing 15 of the leading screw, and the short shaft 14, the sensor connecting rod 16, the tension pressure sensor 17, the hinge 18, the rotating pin shaft 19, the bearing Block 21 and two ankle joint connecting rods 20 are composed of rotating p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More