

Bionic control method and control system of mechanical arm
A control method and a technology of a robotic arm, which are applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large changes in the movements of the manipulators, incoherent movements of the manipulators, and unstable movement processes, so as to improve accuracy and control The action is easy to learn and the effect of short time consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to make the above objects, features and advantages of the present invention more comprehensible, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
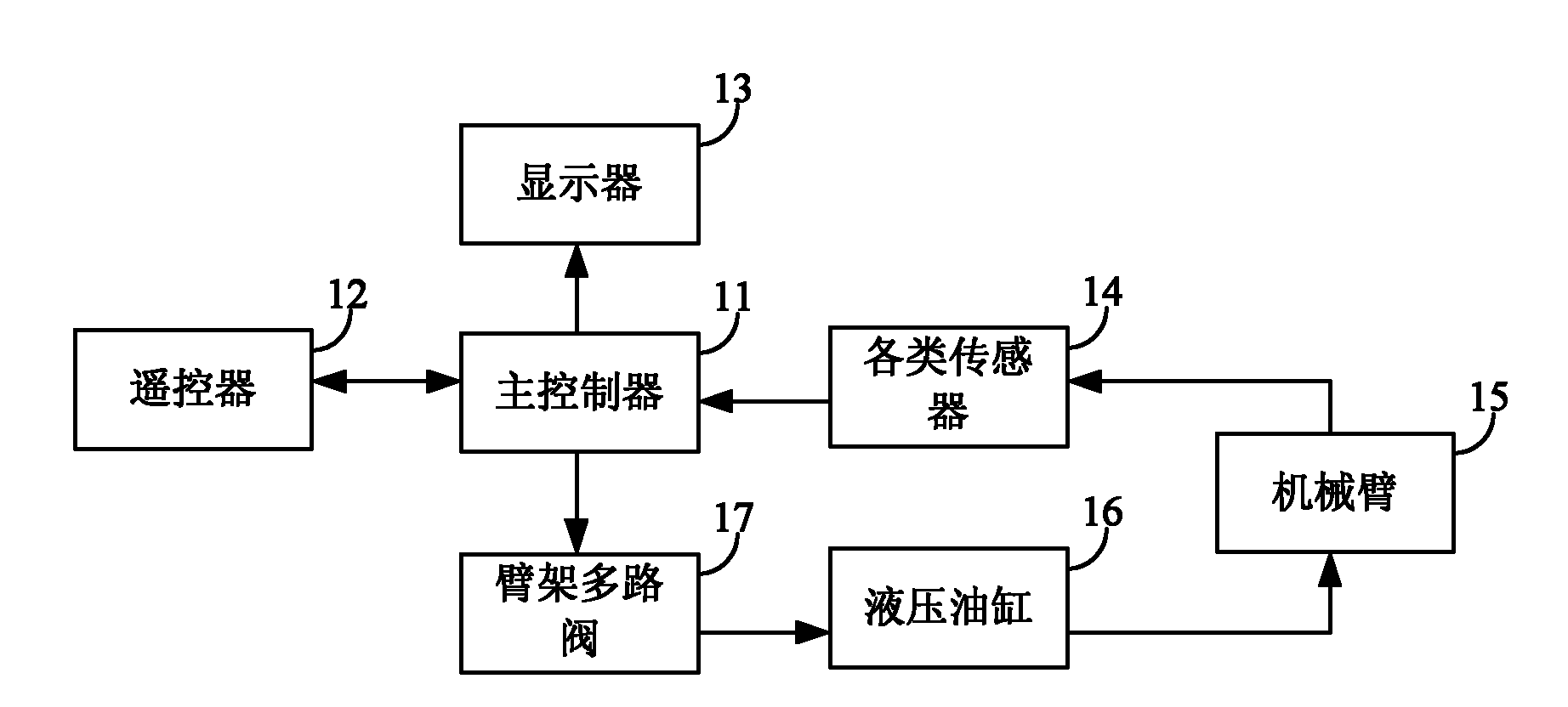
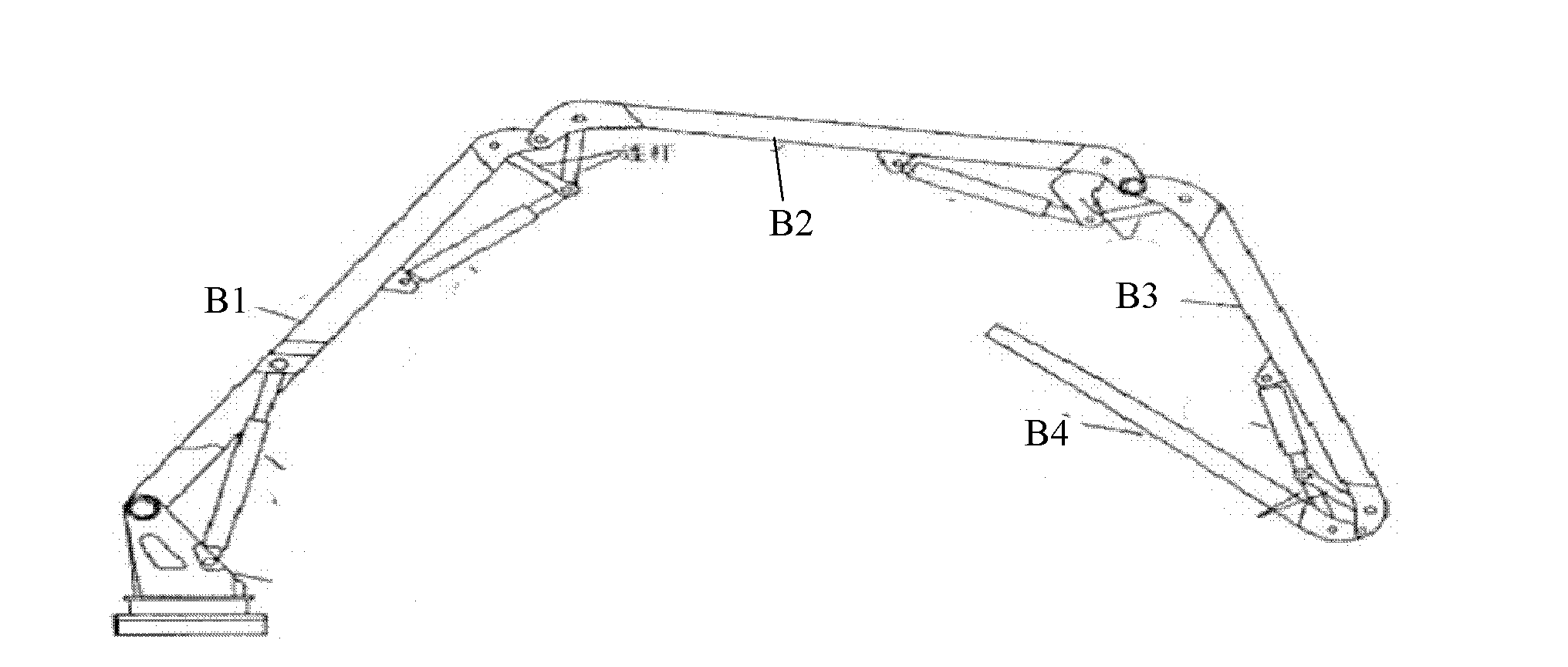
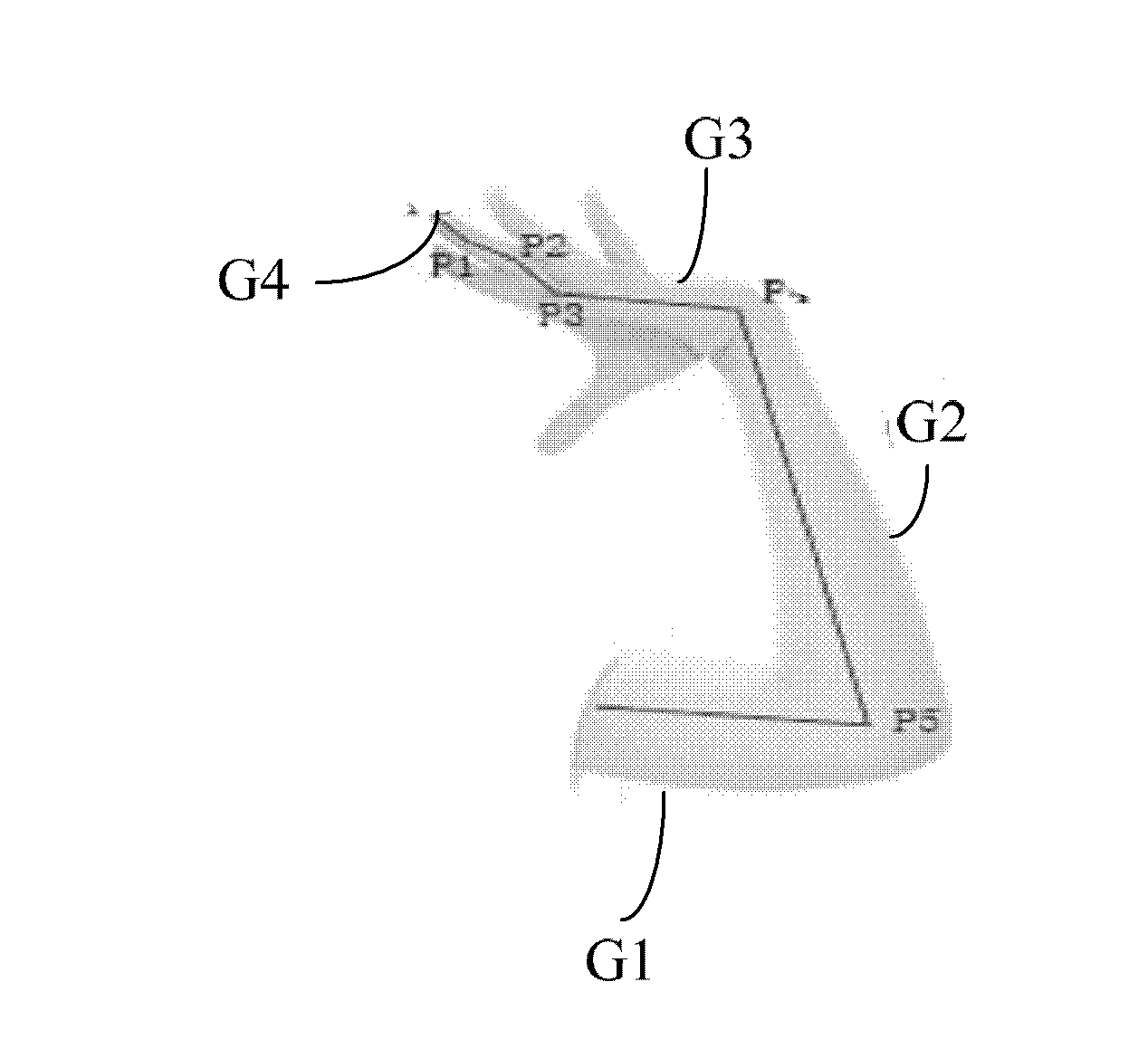
[0038] There are as many as 18 joints from the fingers to the shoulder of the arm, 6 joints in a straight line, 3 joints that can rotate flexibly, and the third joint of the thumb of the hand due to the special muscle mechanism. It can provide certain rotation activities, so through the flexible use of the joints of the hand, it can effectively complete the bionic actions of various mechanical arms. The invention simulates the positions of the joints of the human arm, and manufactures control equipment that can be worn on the arm, and each joint of the control equipment corresponds to each section of the arm frame of the mechanical arm. The control equipment simulates the movement of the robotic arm through bionic actions, control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More