

Mechanical arm for injection molding machine
A technology of manipulator and injection molding machine, applied in the field of manipulator, can solve the problems of unstable movement, low positioning accuracy, low safety performance, etc., and achieve the effect of improving safety and reliability, high positioning accuracy and improving stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
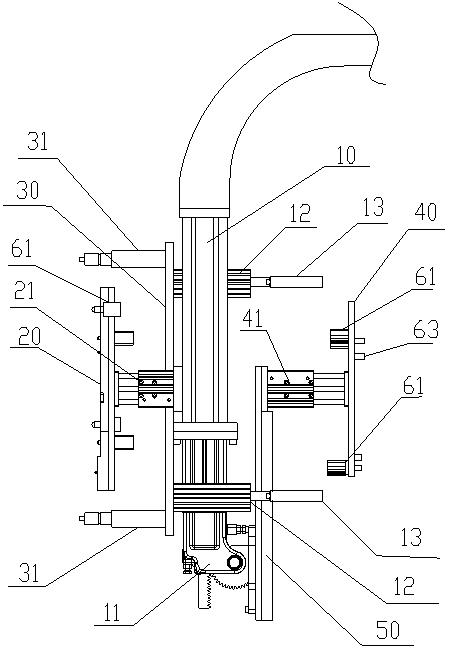
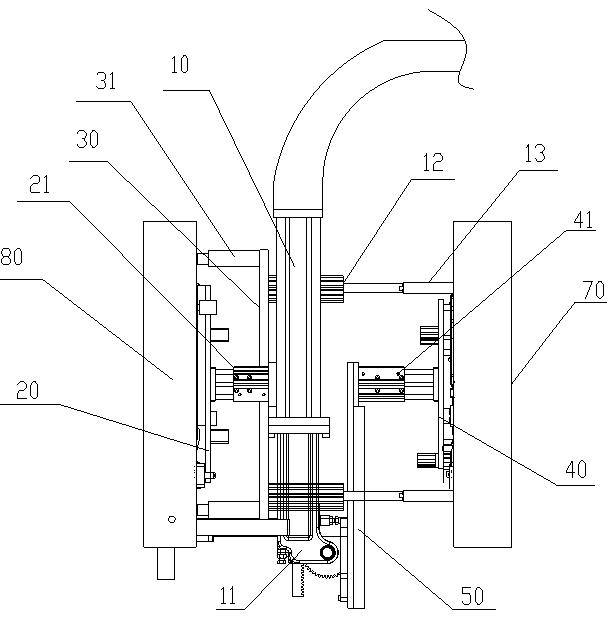
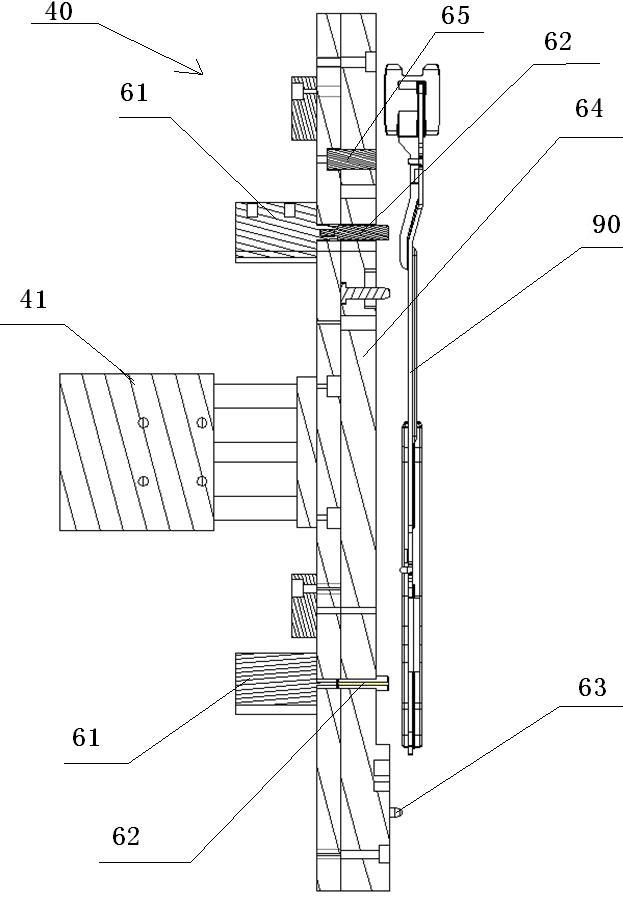
[0023] see Figure 1 to Figure 3 , the manipulator for the injection molding machine in this embodiment includes a connecting plate 10, a rotary motor 44 installed at the end of the connecting plate 41, a semi-finished grabbing plate 20 installed on one surface of the connecting plate 41 and another plate arranged on the connecting plate 10. The finished product grabbing plate 40 at the surface, the finished product grabbing plate 40 is connected with the rotating motor through a finished mechanical arm, and a second cylinder is installed on one end of the finished mechanical arm 50, which is connected with the finished product grabbing plate 40 through the second cylinder Connection, the other end of the finished mechanical arm 50 is connected with the connection plate 10 through the rotary motor 11 . The semi-finished grabbing plate 20 is fixed on the other surface of the connecting plate 10 through the mounting plate 30, and the first cylinder 21 connected with the semi-fin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More