Remotely operated vehicle-simulating trainer
A technology of underwater robots and trainers, applied in simulators, simulators for space navigation conditions, instruments, etc., can solve problems such as unsatisfactory training effects, long training time, and heavy psychological burden, and achieve realistic visual display effects , short training time and simple interface
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
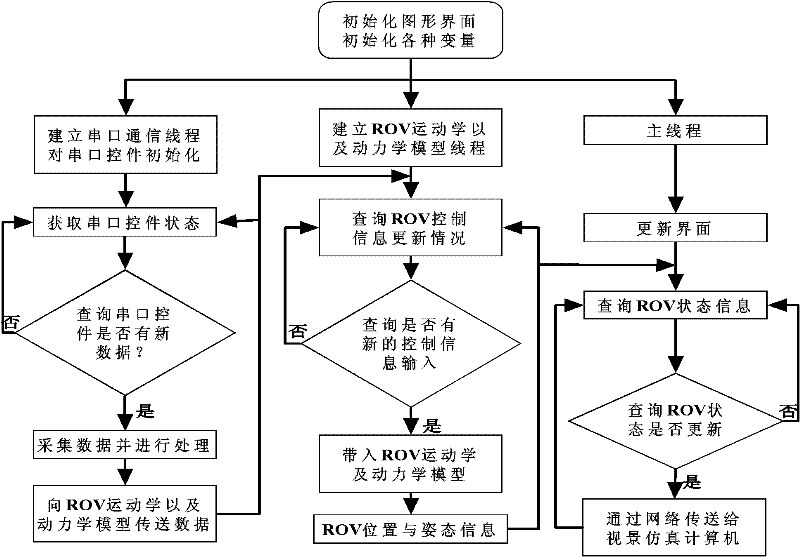
[0035] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
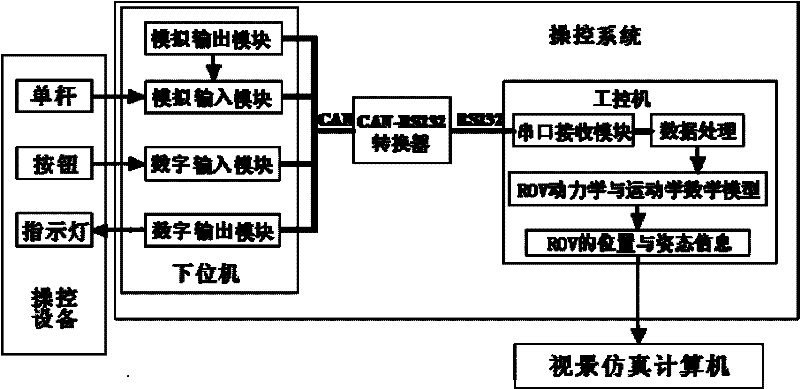
[0036] Such as figure 1 , a remote-controlled underwater robot simulation trainer, comprising
[0037] The manipulation device is used for the operator to change the position and attitude of the virtual underwater robot;
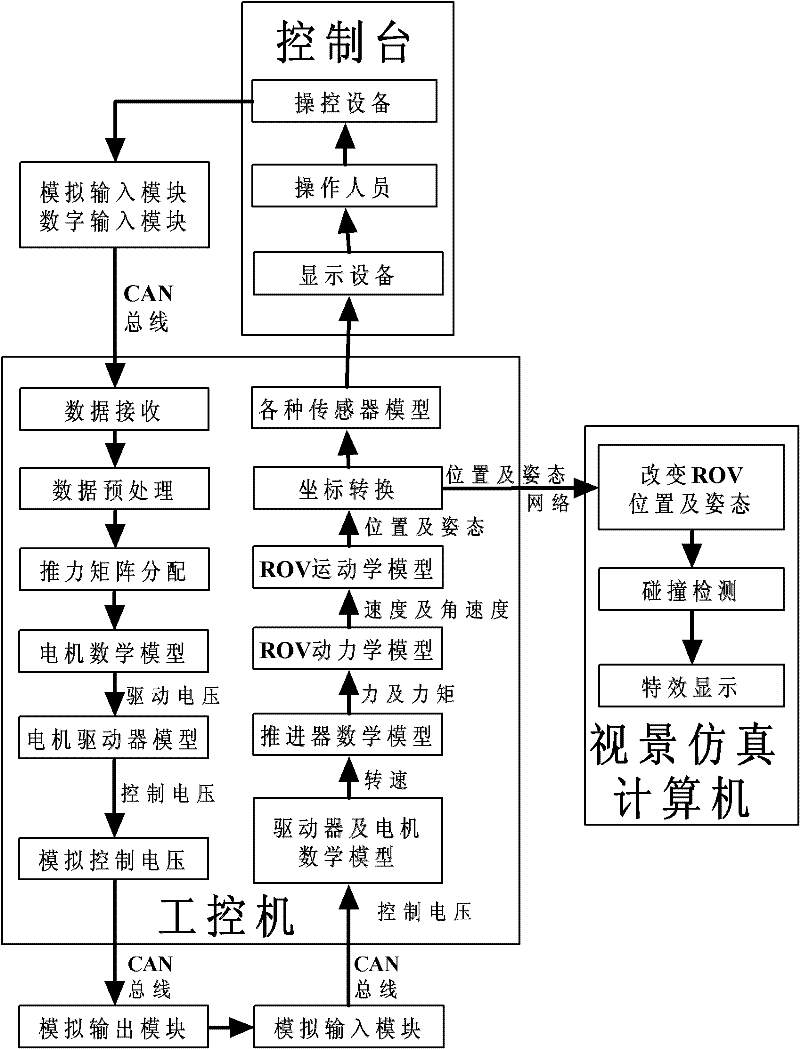
[0038] The control system, which is the core of the present invention, is built with real equipment. Based on the kinematics and dynamics model of the underwater robot, according to the operation of the operator on the control device, calculate the position and attitude of the virtual underwater robot, and transmit the position and attitude information of the virtual underwater robot to the visual simulation computer;
[0039] The visual simulation computer is used for the visual display of the virtual underwater robot.
[0040] The control device includes a single lever, a button and an indicator light.
[0041] The si...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap