

Anthropomorphic dexterous hand device driven by single motor
A single-motor-driven, dexterous hand technology, applied in the field of anthropomorphic robots, can solve the problems of complex four-bar linkage mechanism, high manufacturing cost, and large finger size, and achieve the effects of light weight, low manufacturing and maintenance costs, and strong versatility of parts
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The invention relates to a single-motor-driven humanoid dexterous hand device. The specific structure and working principle of the invention will be described below in conjunction with the accompanying drawings:
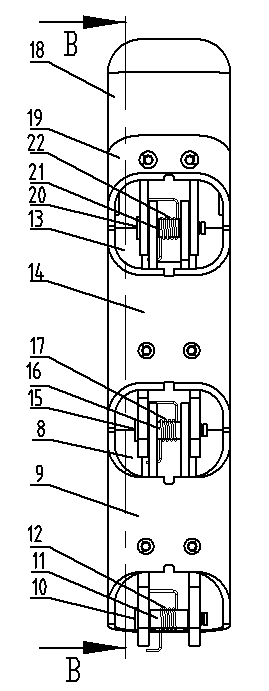
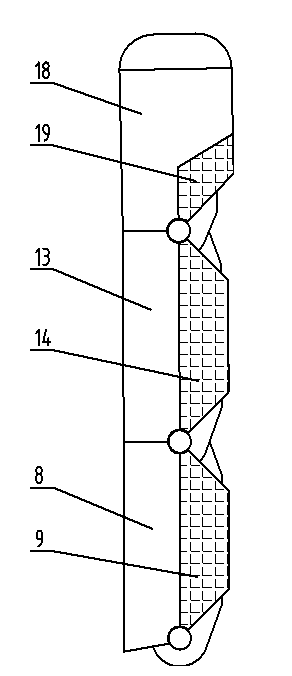
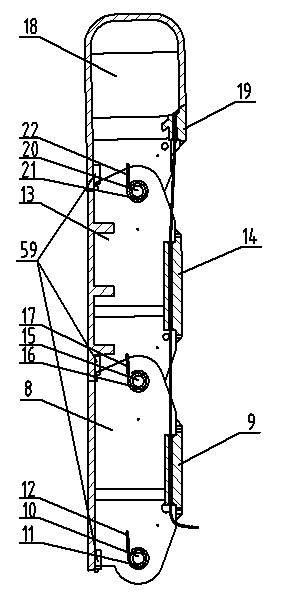
[0041] The working principle of underactuated fingers: the four fingers are designed according to the human hand, and the structure is exactly the same, and the thumb is only different in size, such as figure 1 , figure 2As shown: the finger is composed of three joints: the proximal joint 8, the middle joint 13 and the distal joint 18. Each joint has a corresponding joint cover. The joint and the joint cover are connected by screws, and each joint cover is equipped with a flexible rope that can pass through it. through holes. The joints are linked to each other by pin shafts, sleeves 11, 16, 21 are sleeved on the pin shafts, and torsion springs 12, 17 are over the sleeves, and the two ends of the torsion springs are respectively fixed on the two connected jo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More