

Virtual assembly-oriented collision detection method based on AABB (Axis Aligned Bounding Box)-OBB (Oriented Bounding Box) mixed bounding box
A technology of collision detection and virtual assembly, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems such as low detection accuracy, slow update, high computing resource requirements, and meet comprehensive requirements and real-time performance and the effect of precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
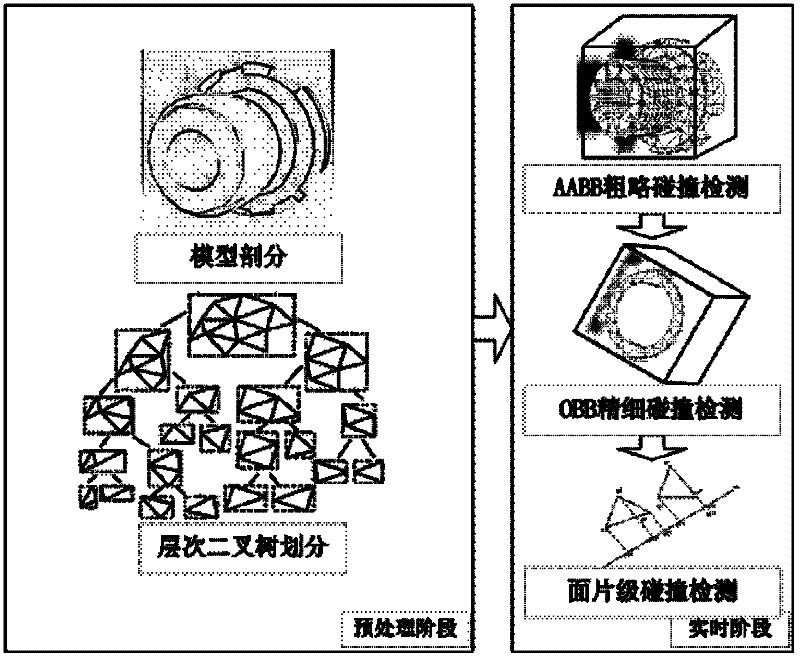
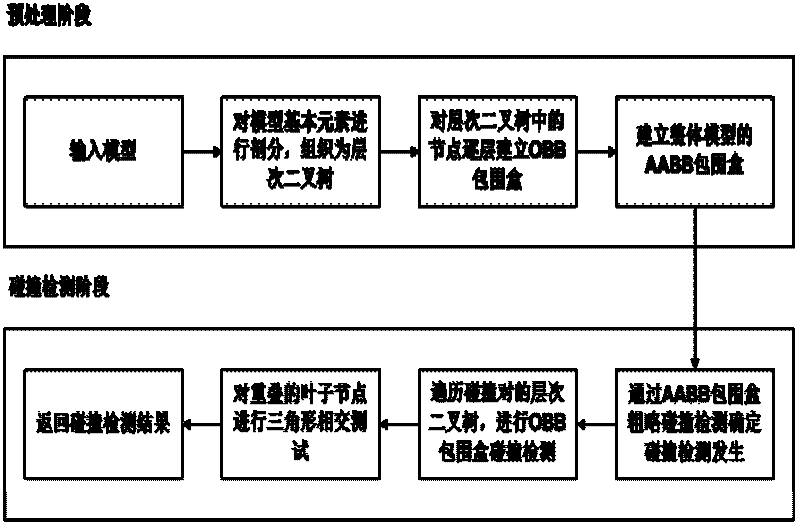
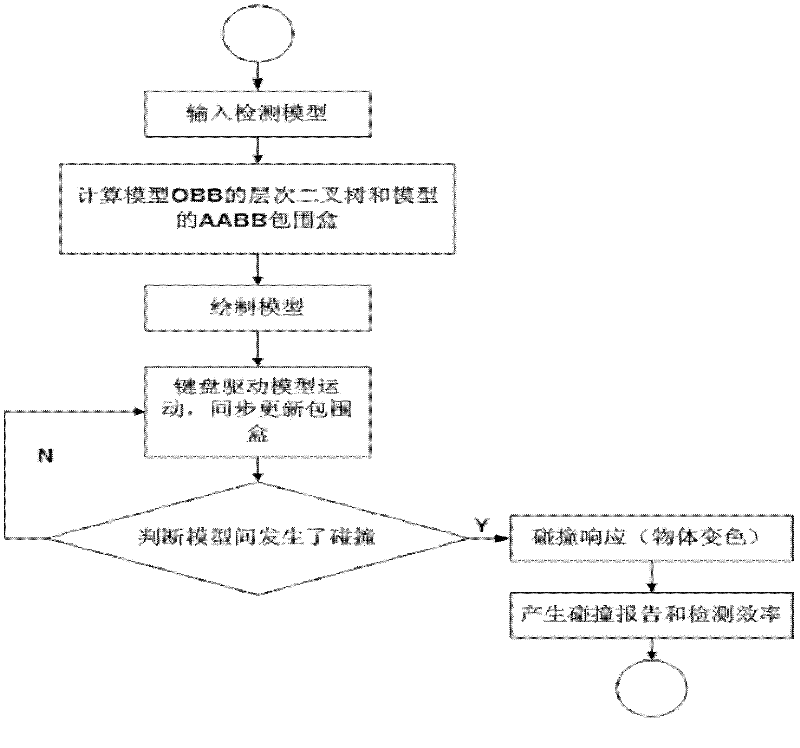
[0020] The main illustration of the present invention is as figure 1 As shown, the algorithm execution framework is as follows figure 2 As shown, the experimental procedure is as follows image 3 As shown, the specific steps are as follows:
[0021] (1) Load the model, usually load the model in OBJ format, and extract the vertex information, vertex normal information, triangle patch information, etc. of the model according to the file line tags v, vn, f respectively.
[0022] (2) According to the extracted model information, in the pre-processing stage, the model is divided, and the OBB level binary tree is divided. Build the AABB bounding box of the model as a whole. By continuously dividing the mesh model, the whole model is organized into a hierarchical bounding volume tree. Based on the real-time requirements, this process i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More