

Deepening controlling method of underactuated automatic underwater vehicle based on neural network back stepping method
An underwater vehicle and neural network technology, applied in the control field of underactuated autonomous underwater vehicles, can solve problems such as complex controller form, high controller gain control signal, undiscussed depth control effect, etc., to ensure the overall Convergence, the effect of meeting the application requirements of multiple working conditions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0026] Specific embodiment one: the process of a kind of underactuated autonomous underwater vehicle depth control method based on the neural network backstepping method described in this embodiment is:
[0027] Step 1. Collect pressure information through a pressure sensor, and calculate the depth of the corresponding autonomous underwater vehicle AUV according to the pressure information;
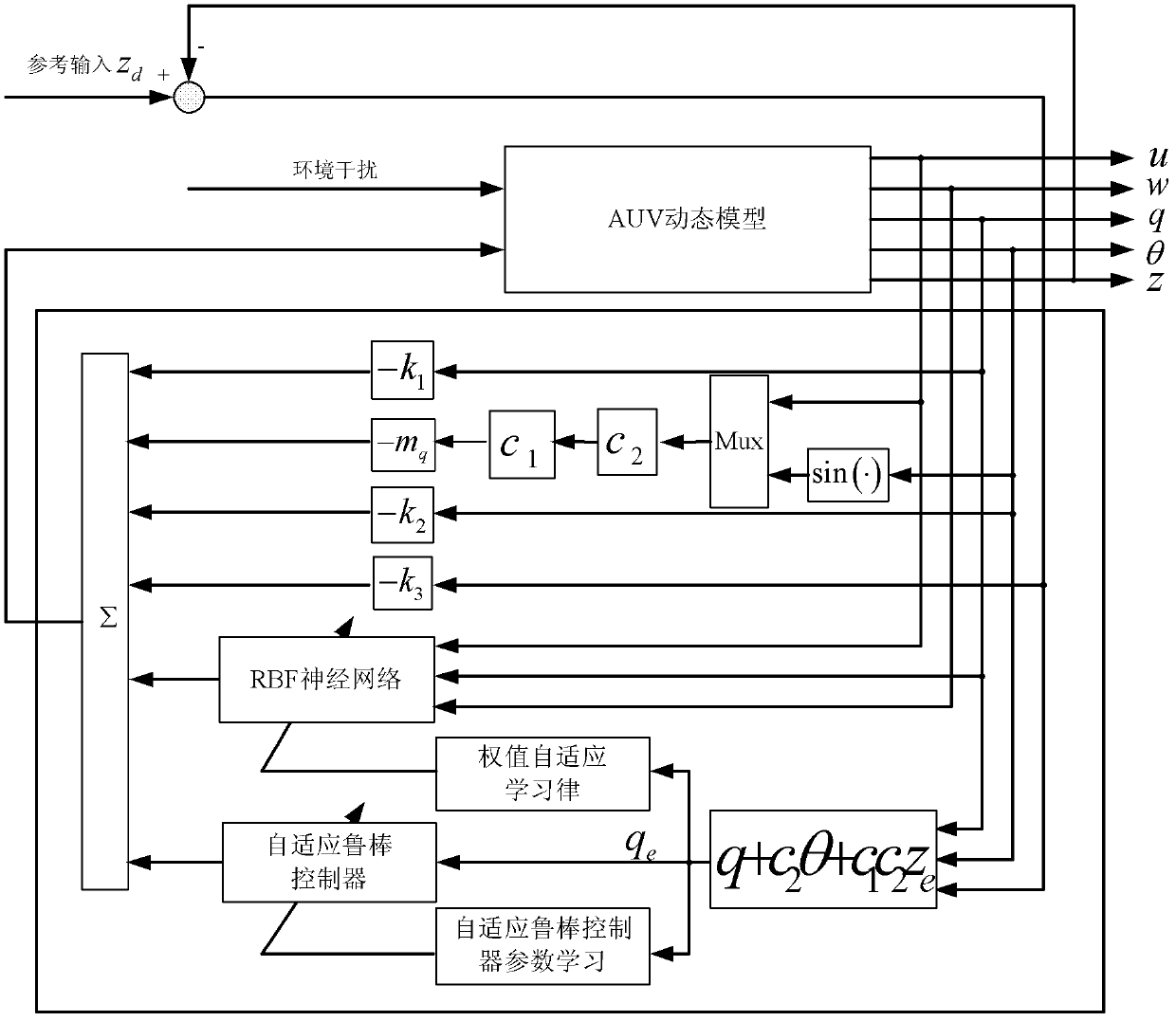
[0028] Step 2. Establish the mathematical model and robust variable depth controller model of the underactuated autonomous underwater vehicle AUV;
[0029]According to the current environment and AUV hydrodynamic parameters, the mathematical model of the underactuated autonomous underwater vehicle AUV is established, and the robust variable depth controller model is designed by using the backstepping method based on feedback gain;
[0030] Step 3. Obtain the online learning algorithm based on neural network weights and the adaptive law of adaptive robust controller parameters, conduct onl...
specific Embodiment approach 2
[0037] Specific embodiment two, this embodiment is a further detailed description of the underactuated autonomous underwater vehicle depth control method based on the neural network backstepping method described in the specific embodiment one in conjunction with the accompanying drawings:
[0038] In step (2), the process of establishing the mathematical model of the underactuated autonomous underwater vehicle AUV is:
[0039] Neglecting the influence of rolling motion on the vertical motion, the simplified vertical motion equation is obtained, and the longitudinal velocity of the autonomous underwater vehicle AUV is controlled by the thrust system alone to maintain a stable speed u d ,
[0040] Then the dynamic differential equation of the mathematical model of autonomous underwater vehicle AUV is:
[0041] w · = 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More