

Dynamic lever arm compensating method of position and posture measuring system (POS) for aerial remote sensing
A technology of aerial remote sensing and measurement system, applied in the field of aerial remote sensing, can solve the problems such as the difficulty of accurate compensation of the POS lever arm, and achieve the effect of improving precision and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
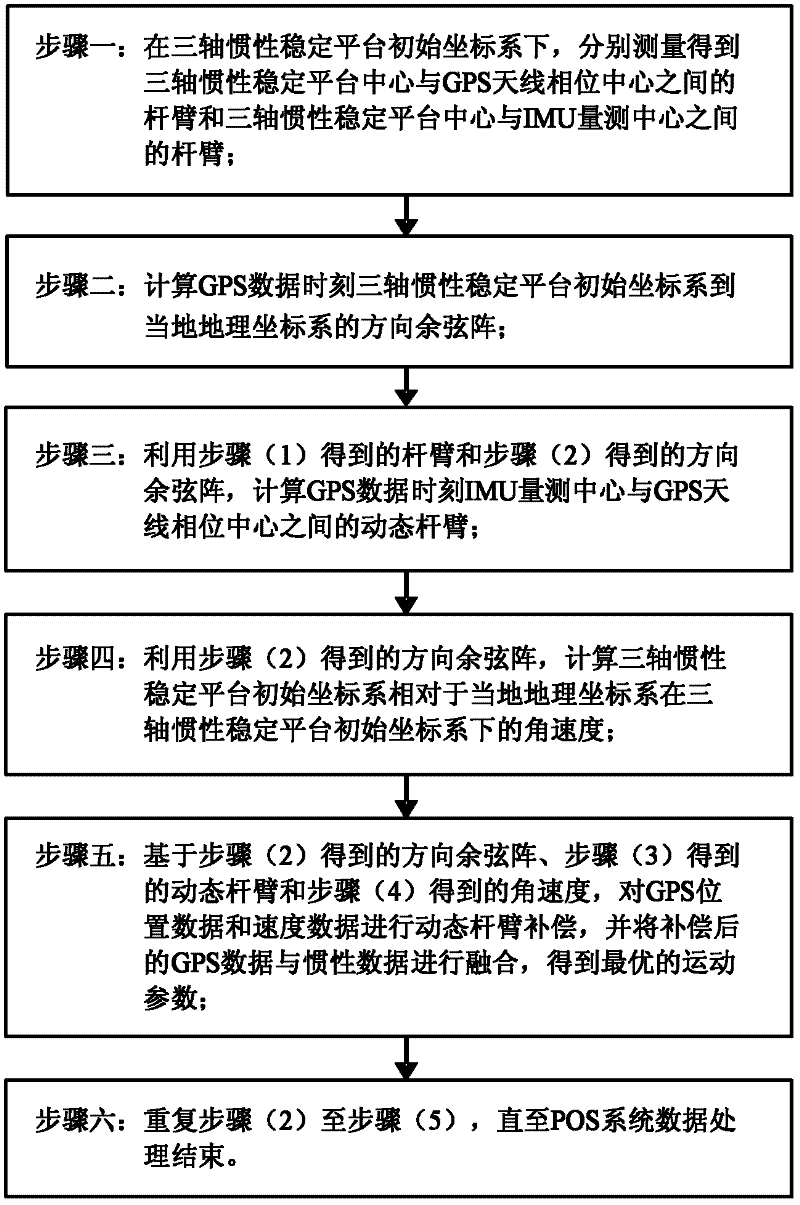
[0017] As attached to the manual figure 1 Shown, concrete implementation of the present invention comprises the following steps:
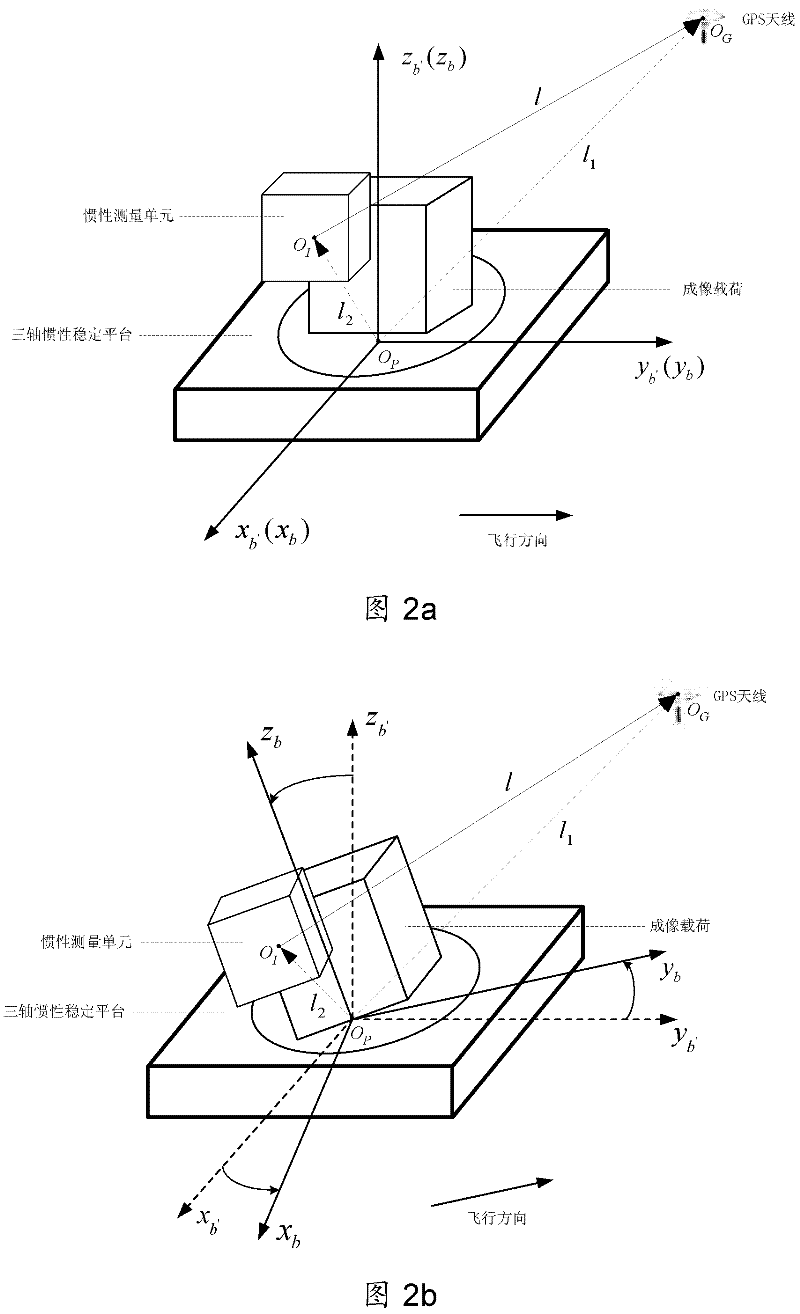
[0018] 1. Set the three-axis inertial stabilized platform to the leveling mode, the three-axis inertial stabilized platform controls the three-axis frame, so that the output of the three-axis electric encoder of the inertial stabilized platform is zero, and set the internal frame coordinate system of the three-axis inertial stabilized platform at this time is the initial coordinate system ox of the three-axis inertial stabilized platform b′ the y b′ z b′ , denoted by b′; let the real-time inner frame coordinate system ox of the three-axis inertial stabilized platform b the y b z b Denoted by b; let the local geographic coordinate system ox n the y n z n Expressed in n. In the initial coordinate system ox of the three-axis inertial stabilized platform b′ the y b′ z b′ Next, use the theodolite to measure the center O of the three-axis in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More