

Butt joint positioning and navigation strategy for robot based on single camera and light-emitting diode (LED)
A monocular camera, robot technology, applied in two-dimensional position/channel control, navigation, mapping and navigation, etc., can solve the problems of insufficient positioning and navigation information, limit the efficiency of group robots, and low use value, and achieve simple design. , the effect of improving efficiency and low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be described in further detail below in conjunction with the accompanying drawings.
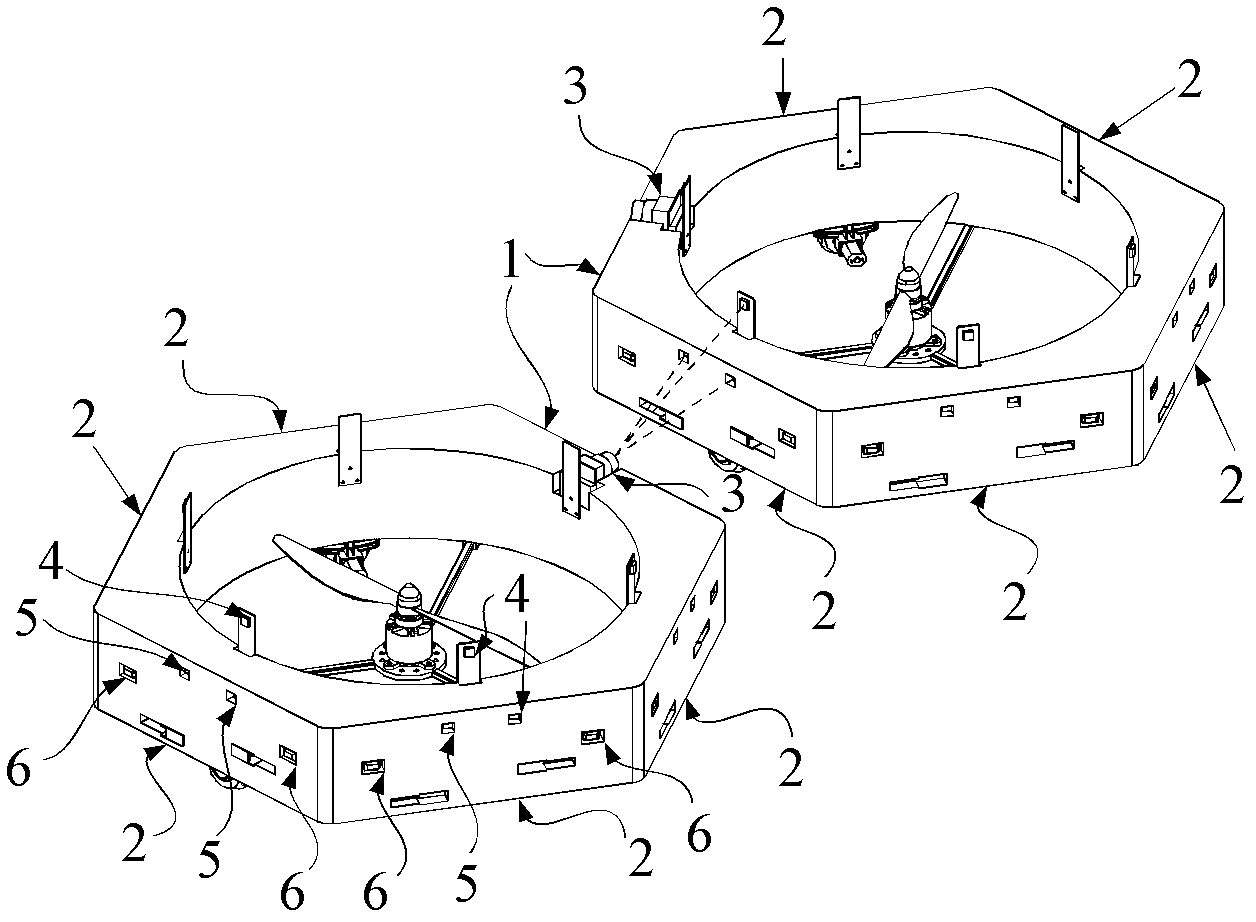
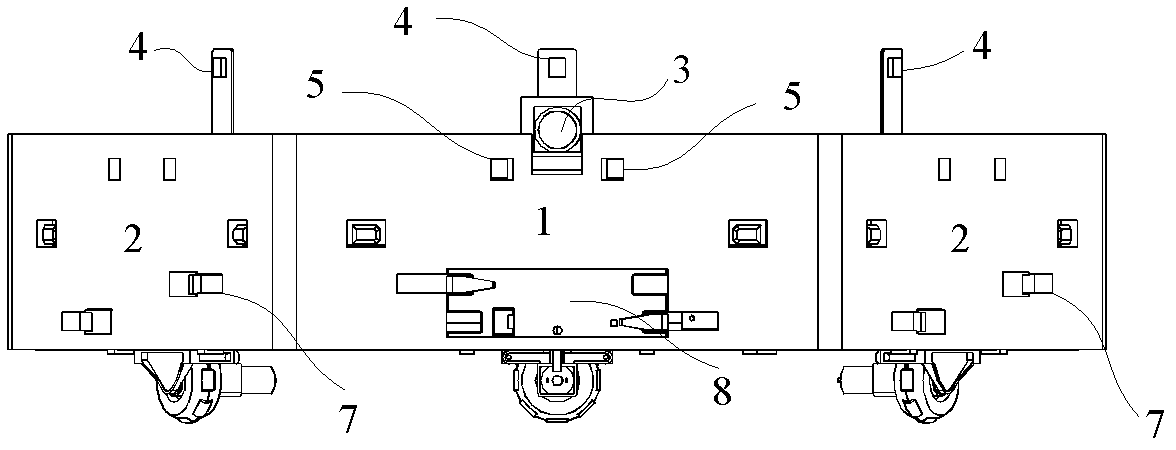
[0035] see Figure 1~2 As shown, the positioning and navigation strategy in the present invention realizes positioning and navigation between robots by observing LEDs with a CMOS monocular camera. figure 1 A basic strategy for localization and navigation between two robots is shown. The robot includes at least two sides, one of which is an active docking surface 1 and the rest is a passive docking surface 2. The active docking surface 1 and the passive docking surface A group of LEDs (including two bottom LEDs and a top LED4), two analog infrared transceiver sensors 6 and a pair of docking slots 7 are respectively arranged on the surface 2, and a pair of docking buckles are also arranged on the active docking surface 1 8 and CMOS monocular camera 3 (camera for short). Observe the color of the LED group on robot B through the CMOS monocular camera 3 on the a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More