

Implementation method of real-time collision detection system
A technology of collision detection and collision model, applied in 2D image generation, image data processing, instruments, etc., can solve the problems of not being suitable for large-scale scenes and long preprocessing time, so as to reduce the calculation amount of collision detection, process efficiently, and meet The effect of high-volume and efficient calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
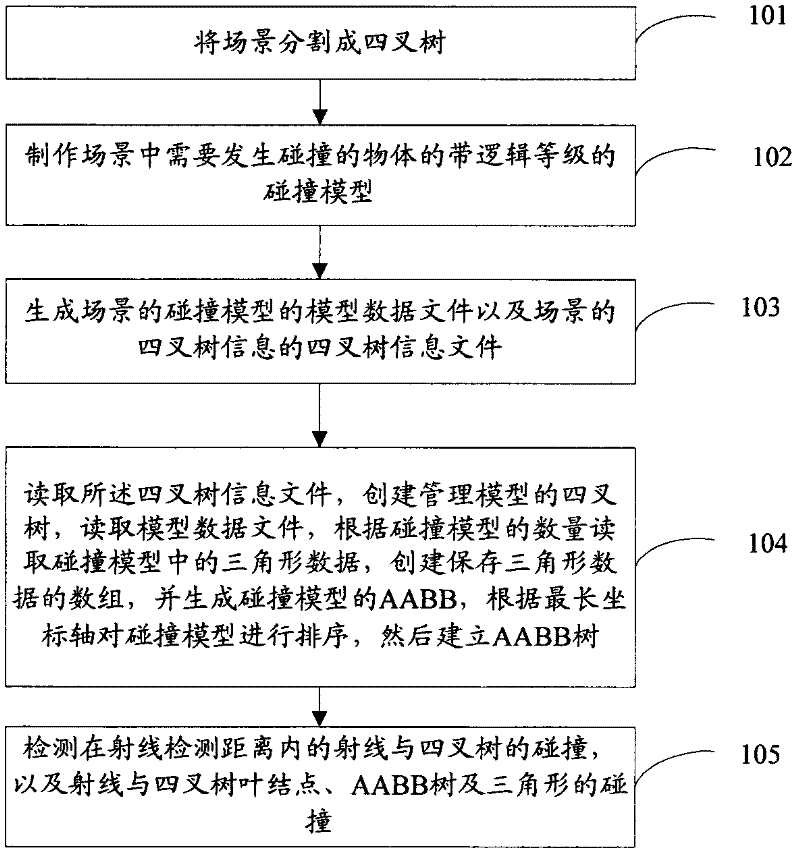
[0070] figure 1 It shows the implementation method flow of a real-time collision detection system proposed by the embodiment of the present invention, including the following steps:
[0071] Step 101: Divide the scene into quadtrees;
[0072] Step 102: Make a collision model with a logical level of objects that need to collide in the scene;
[0073] Step 103: Generate the model data file of the collision model of the scene and the quadtree information file of the quadtree information of the scene;
[0074] Step 104: Read the quadtree information file, create a quadtree for the management model, read the model data file, read the triangle data in the collision model according to the number of collision models, create an array for saving the triangle data, and generate Aligned Axis Bounding Box (AABB, Aligned Axis Bounding Box) of the collision model, sorts the collision model according to the longest coordinate axis, and then builds the AABB tree;
[0075] Step 105: Detect t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More