

Seven-range of motion carrying robot
A technology for handling robots and mobility, applied in the field of handling robots, can solve the problems of small working space, accumulation of joint errors, and inflexible movements of parallel robots, and achieve the effects of high rigidity, small cumulative errors, and flexible trajectory output
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
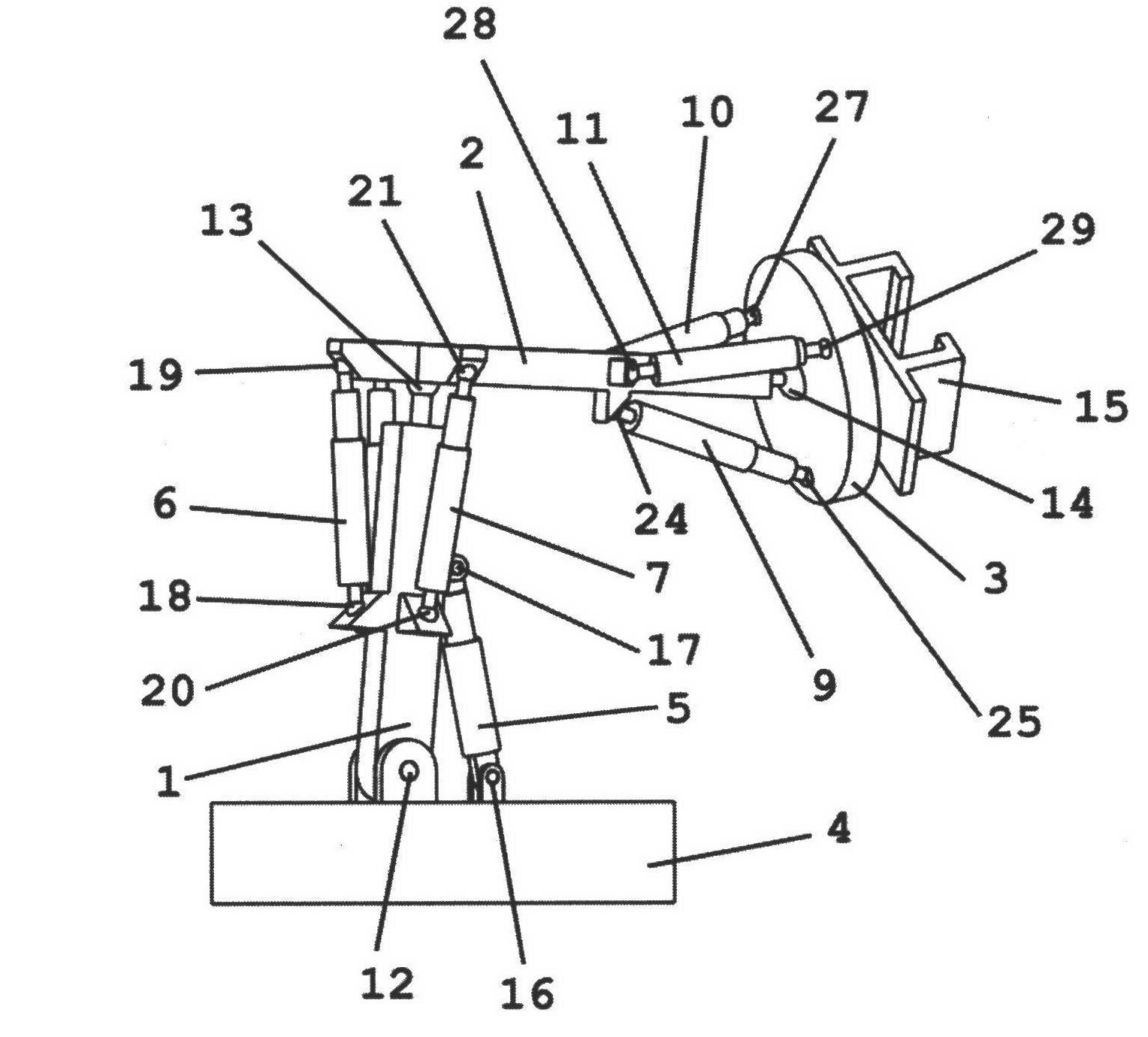
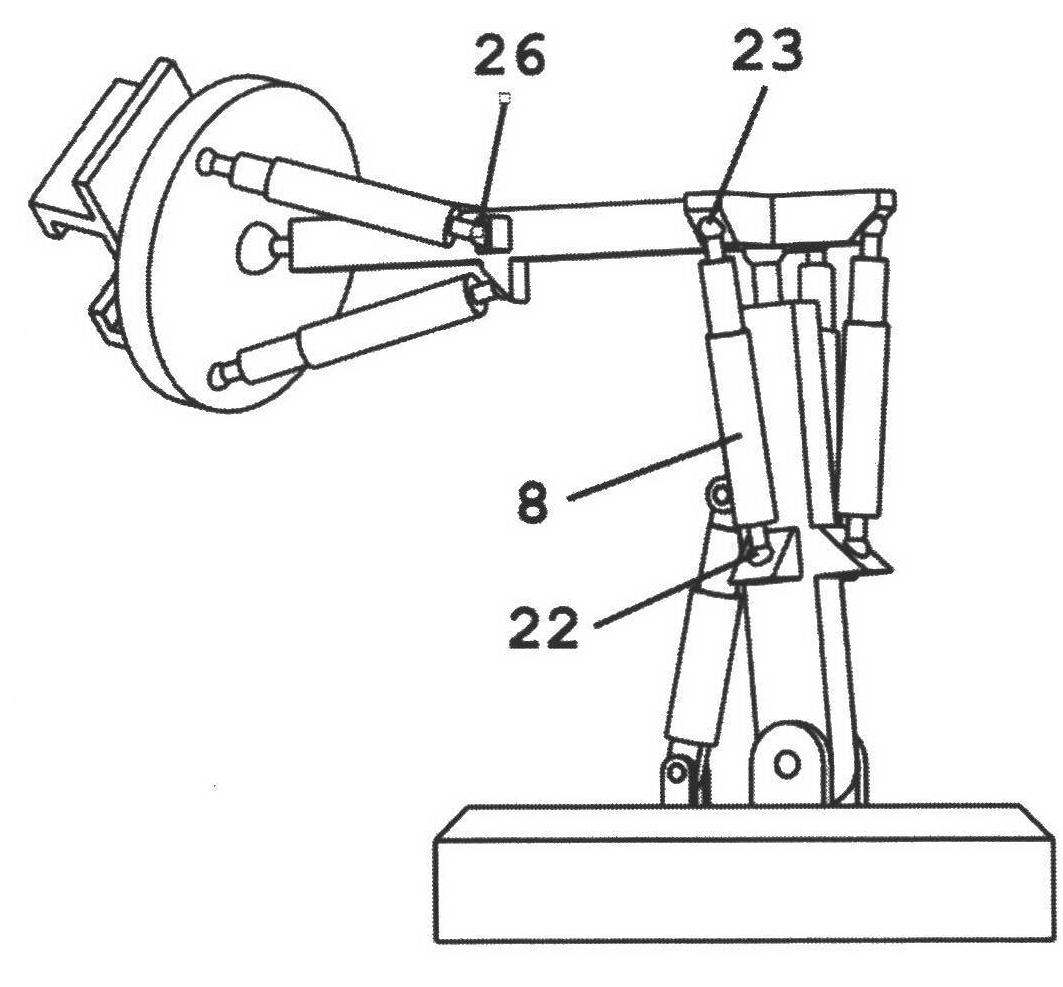
[0018] control figure 1 and 2 , a seven-movement handling robot, including a large arm 1, a small arm 2, a moving platform 3, a frame 4, a first linear drive 5, a second linear drive 6, a third linear drive 7, a fourth linear drive 8, and a second linear drive. The fifth linear driver 9, the sixth linear driver 10, and the seventh linear driver 11 have the following structures and connection methods: one end of the boom 1 is connected to the frame 4 through the first rotating pair 12, and the other end is connected to the frame 4 through the first spherical joint 13. The forearm 2 is connected, one end of the forearm 2 is connected with the boom 1 through the first ball joint 13, and the other end is connected with the moving platform 3 through the second ball joint 14, and an electromagnetic clamping device 15 is installed o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More