

Three-degree-of-freedom parallel-connection mechanical wrist
A degree of freedom and parallel technology, applied in the field of mechanical wrists, can solve the problems of heavy weight and large moment of inertia of mechanical wrists, and achieve the effect of simple and compact structure, high degree of modularization, and error compensation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
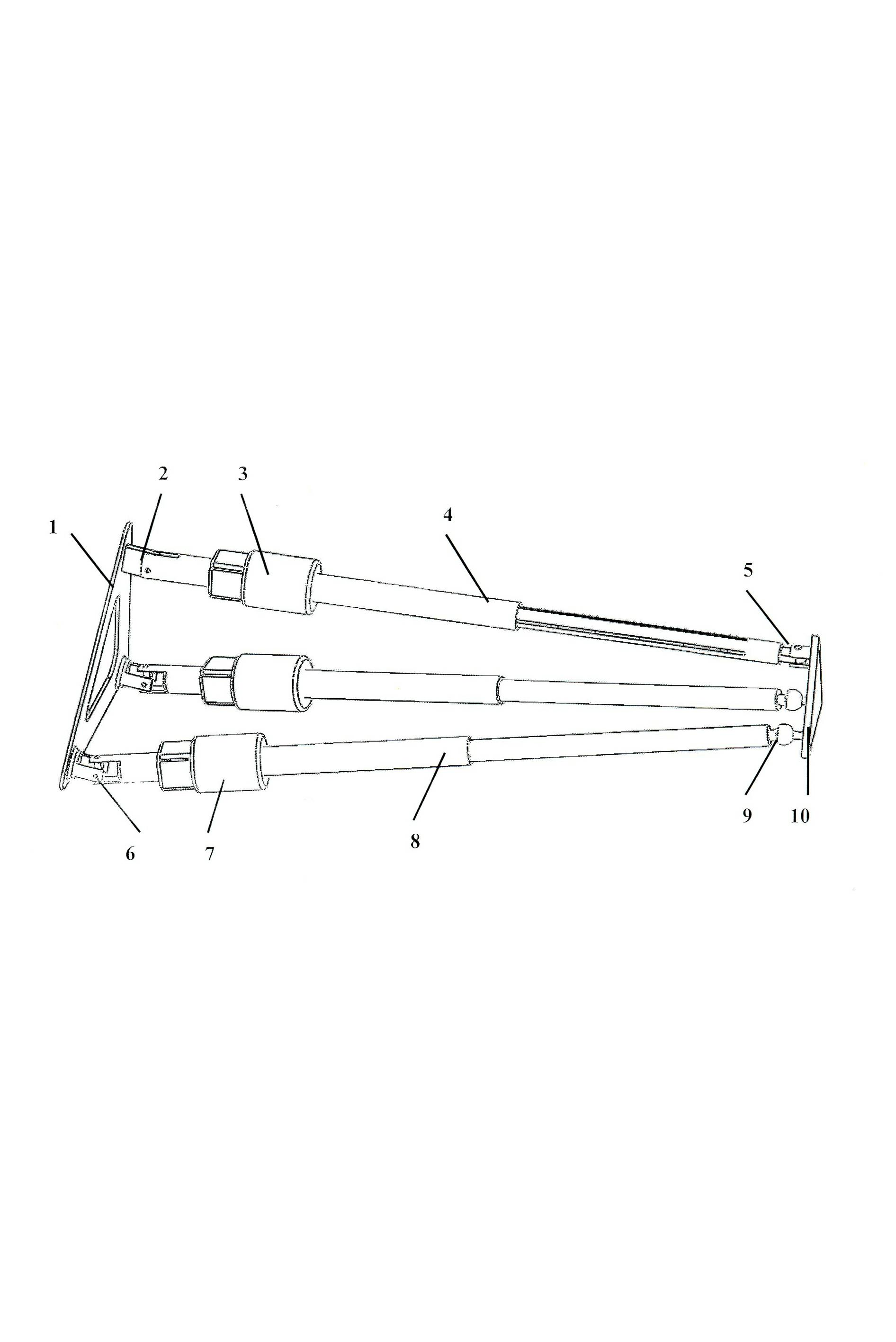
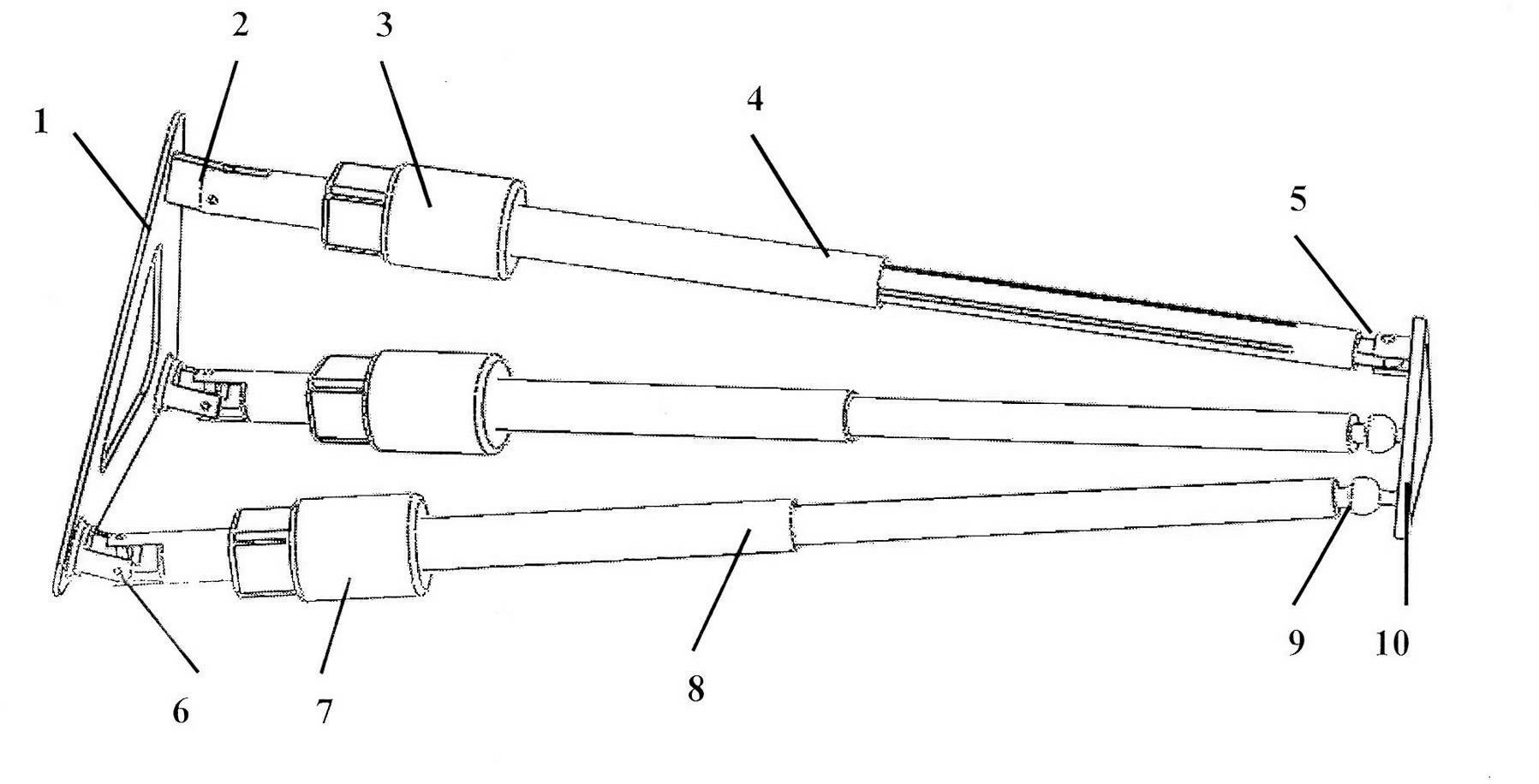
[0017] exist figure 1 In the three-dimensional schematic diagram of a 3-DOF parallel mechanical wrist shown, the two ends of a constrained driving branch chain and two driving branch chains with the same structure are respectively connected to the machine base 1 and the moving platform 10, and the connection points are all in the shape of an equilateral triangle Symmetrically distributed, the driving motors 3 and 7 of each branch chain are all installed on the mobile pair near the side of the machine base. The constraining driving branch chain is an RPR type series structure, in which one end of the driving moving pair 4 is connected to the machine base through the rotating pair 2 , and the other end of the driving moving pair is connected to the moving platform through the rotating pair 5 . The axes of the above two revolving pairs are respectively parallel to the planes of the machine base and the moving platform. When the rotation angles of the above two revolving pairs are...
Embodiment 2
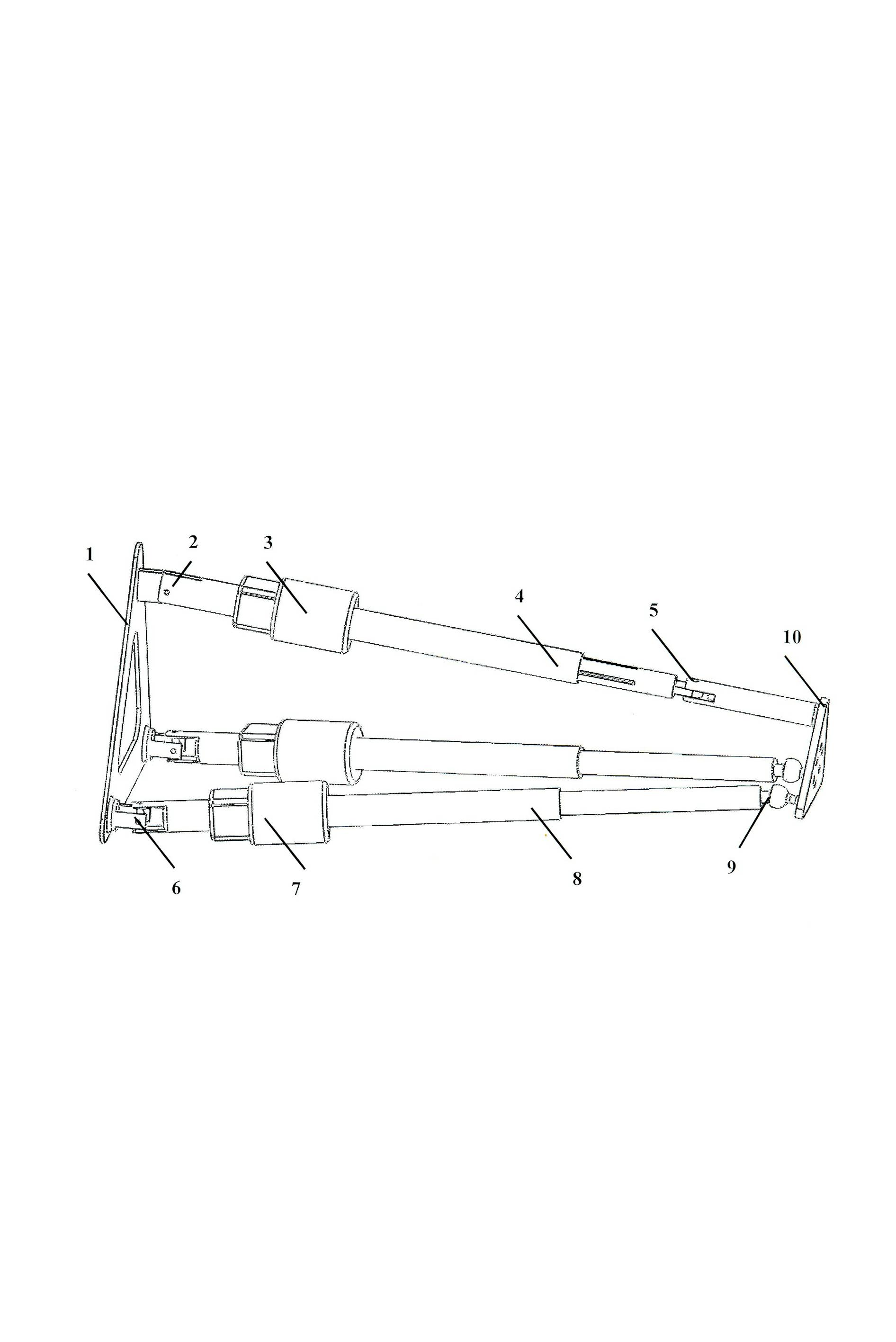
[0019] exist figure 2 In the three-dimensional schematic diagram of a parallel mechanical wrist with 3 degrees of freedom shown, the length between the center line of rotation of the revolving pair 5 and the moving platform 10 in the constraining drive branch chain is increased, and other components and their connection relationship are the same as figure 1 same.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More