

Method for planning path of lift object for crane
A path planning and crane technology, which is applied in the direction of data processing application, prediction, calculation, etc., can solve the problems of not fully considering the factor of obstacle height, poor convergence and stability, and insufficient consideration of influence, so as to achieve accurate hoisting path planning, Good safety and reliability, high hoisting precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Hereinafter, the present invention will be described in detail with reference to the drawings and examples. It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other.
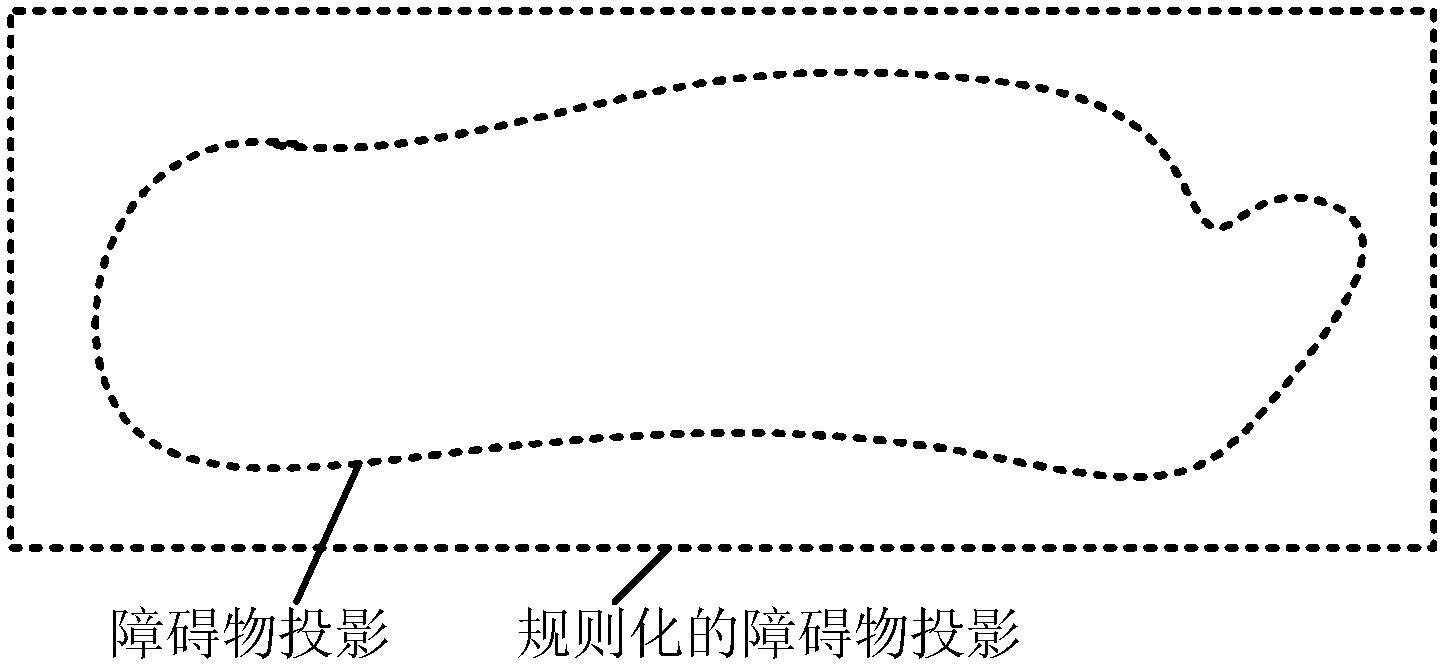
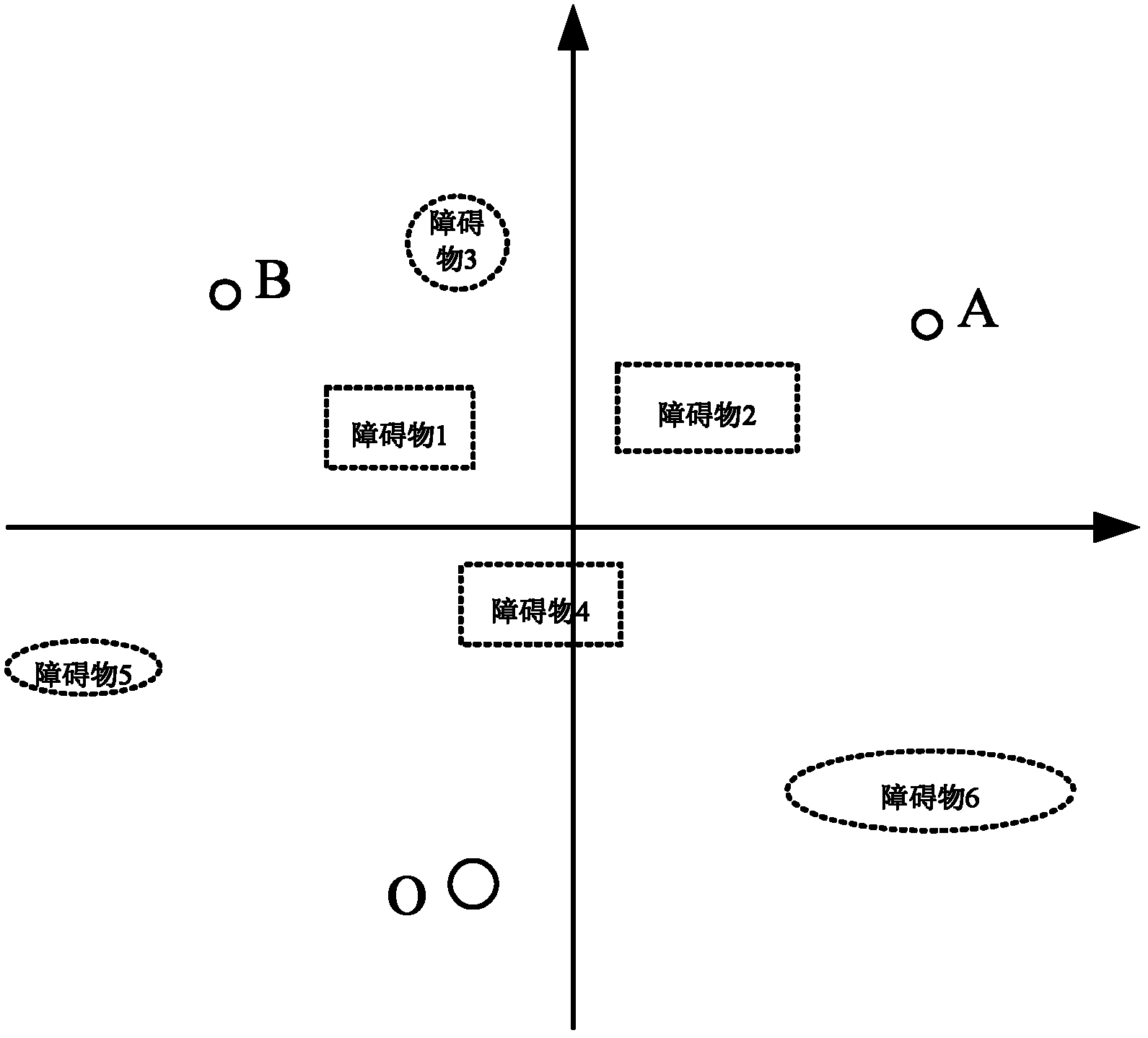
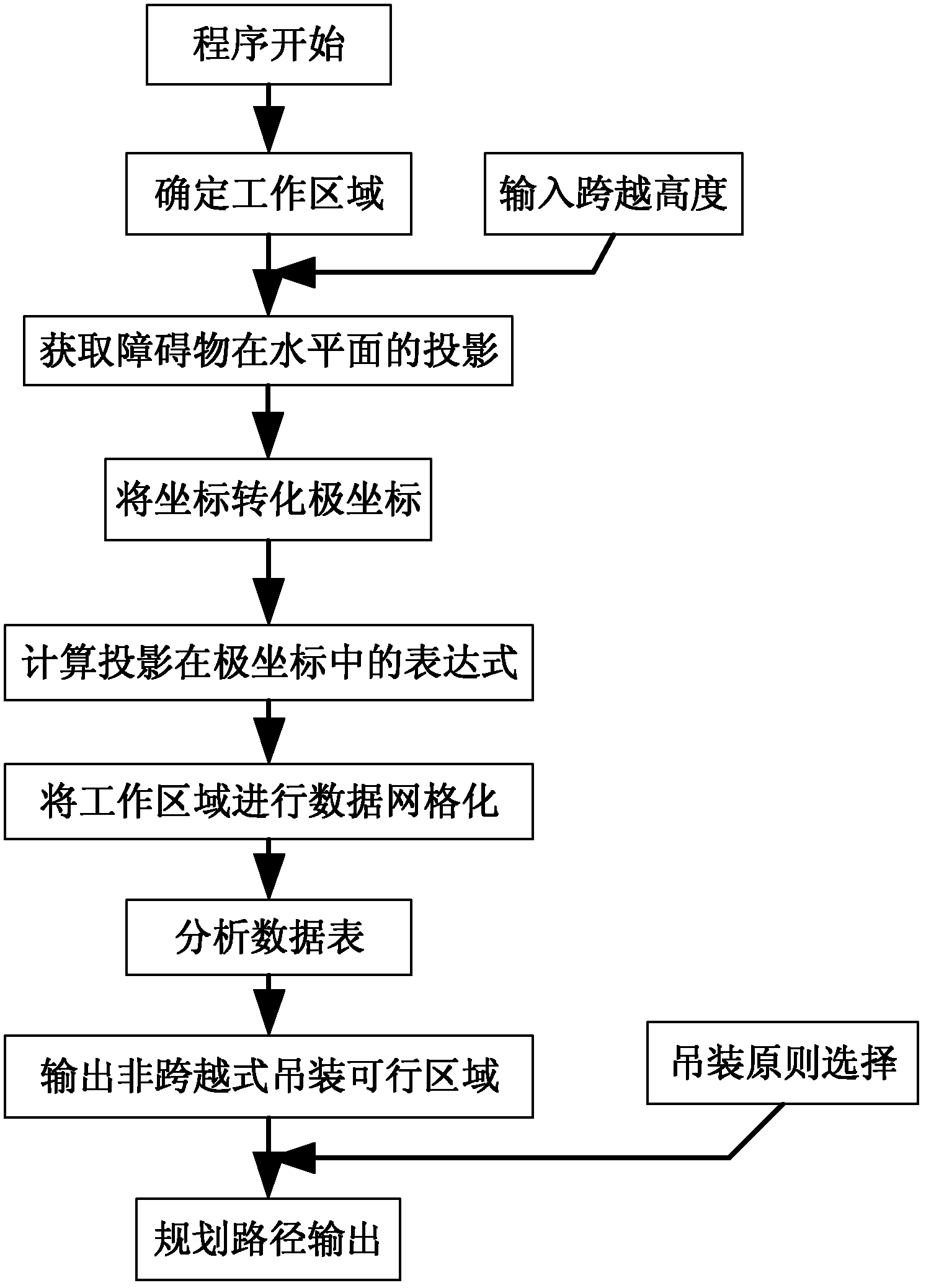
[0035] Such as Figure 1 to Figure 9 As shown, according to the embodiment of the present invention, the crane includes a crane turret and a luffing mechanism, and the path planning method for the hoisting object of the crane takes the rotation axis of the crane turret as the center of the circle, and divides the area that the hoisting object passes from the hoisting starting point to the hoisting end point , with the polar diameter coordinates as a reference, the obstacles on the hoisting path of the hoisting object are analyzed and projected, and the smooth hoisting of the hoisting object is realized by adjusting the luffing mechanism.
[0036] Please refer to Figure 1 to Figure 3As shown, in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More