

Accurate positioning system for outdoor mobile robot
A mobile robot and robot positioning technology, which is applied in satellite radio beacon positioning systems, radio wave measurement systems, instruments, etc., and can solve problems such as system errors, ephemeris errors, and clock differences.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings.
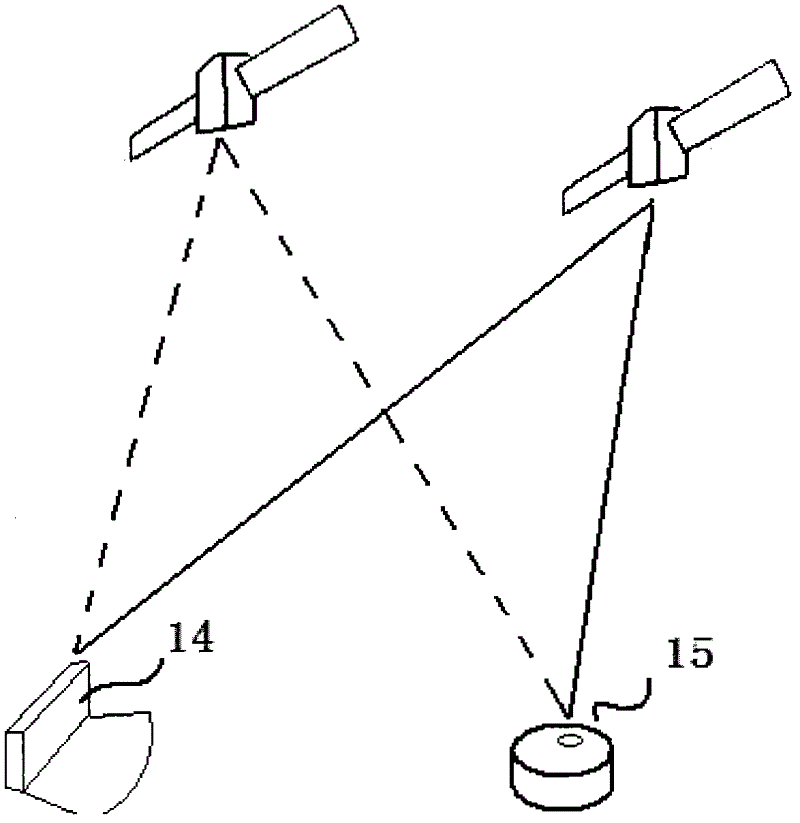
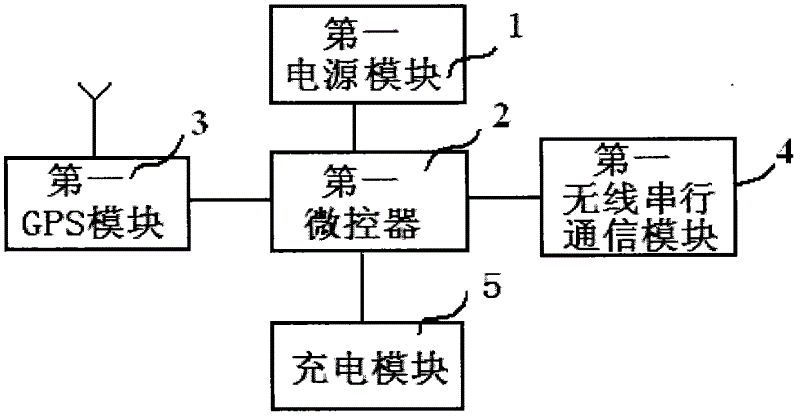
[0020] refer to Figure 1-3 , an accurate positioning system for an outdoor mobile robot, including a base station 14 providing a charging interface for the mobile robot 15, the base station 14 is provided with a base station electronic control device, and the base station electronic control device includes a first power supply module 1 that provides a stable power supply, The first micro-controller 2 for centralized processing and the charging module 5 for controlling the charging process also include a first GPS module 3 for acquiring base station positioning data, and a first wireless serial communication module 4 for data transmission.
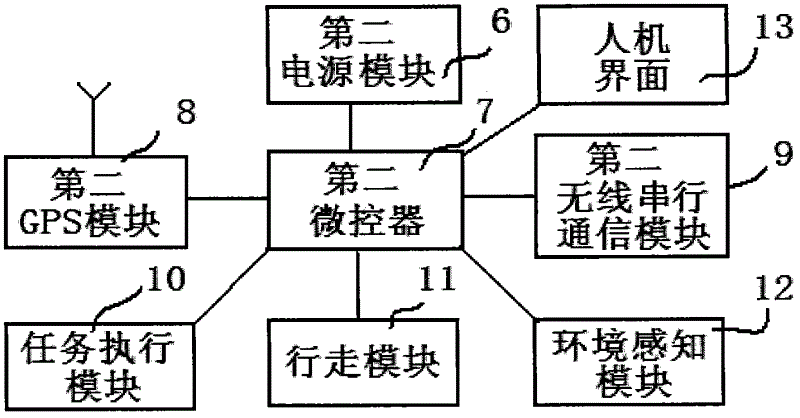
[0021] The mobile robot 15 is provided with a robot electronic control device, and the robot electronic control device is provided with a second power supply module 6 providing a stable power supply, a second micro-controller 7 for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More