Obstacle avoiding method for underwater navigation device
An underwater vehicle and obstacle avoidance technology, which is applied in three-dimensional position/channel control and other directions, can solve problems such as undiscovered, and achieve the effect of easy control and simple algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
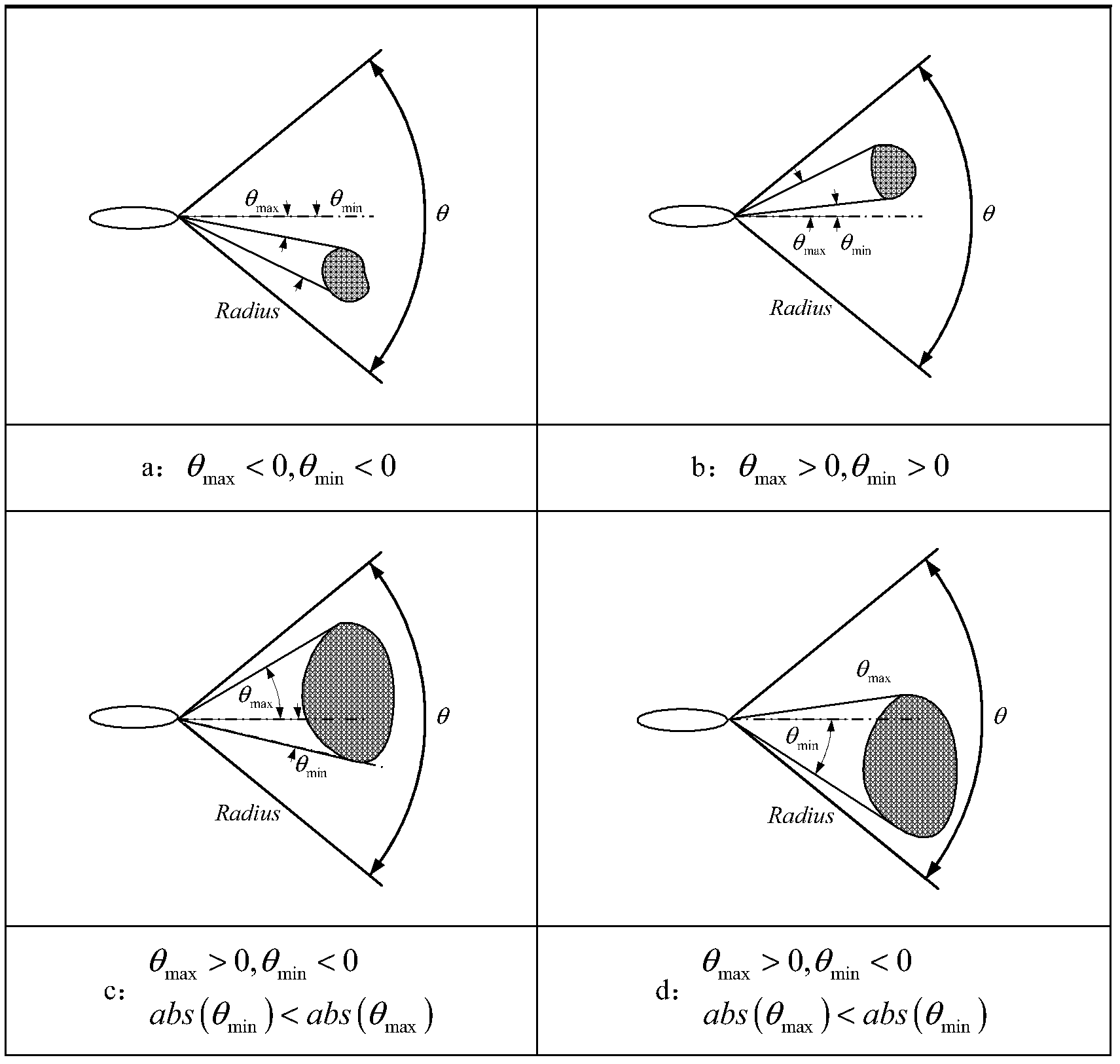
[0048] Step 1: According to the obstacles detected by the underwater vehicle, the obstacles located on both sides of the central axis of the underwater vehicle are the first category; d=60 is the distance between the obstacle and the underwater vehicle;
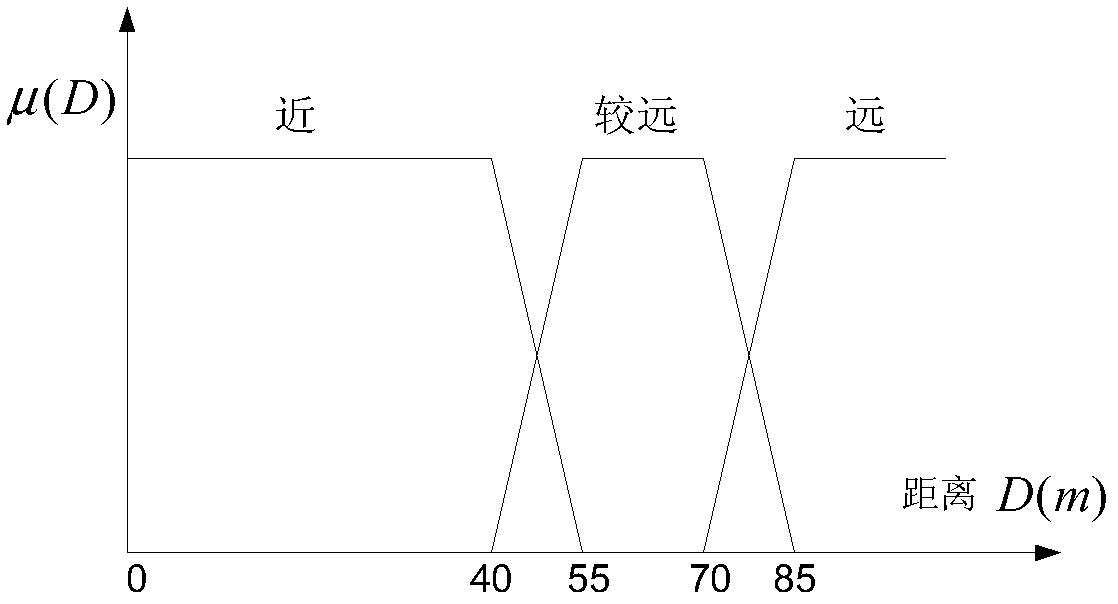
[0049] Step 2: Calculate the membership degree of each linguistic variable corresponding to the distance between the underwater vehicle and the obstacle,
[0050] mu 近 (d)=0; μ 较远 (d)=1; μ 远 (d)=0
[0051] {"near", "far", "far"} is the language variable of the distance;
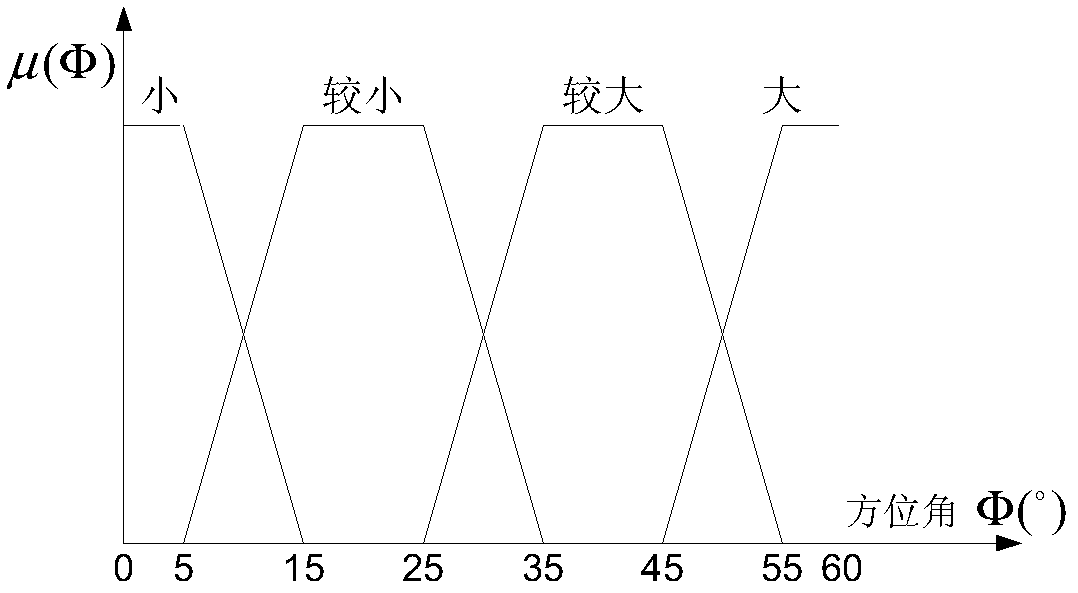
[0052] Step 3: Calculate the degree of membership of each linguistic variable corresponding to the angle between the central axis of the underwater vehicle and the obstacle; Φ=20 is the angle between the obstacle and the central axis of the underwater vehicle;
[0053] mu 小 (Φ)=0; μ 较小 (Φ)=1; μ 较大 (Φ)=1; μ 大 (Φ)=0
[0054] {"small", "smaller", "larger", "big"} is the linguistic variable of the angle;
[0055] Step 4: Define the language variable of...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com