

Moment distribution method for rapid maneuvering satellite based on mixed actuating mechanism
A technology of mixed execution and maneuvering satellites, which is applied in the direction of artificial satellites and aerospace vehicle guidance devices, can solve the problems of reduced execution torque and low precision, and achieve the effect of fast maneuvering and optimal hybrid power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0028] Specific implementation mode one: the following combination figure 1 To describe this embodiment,
[0029] A torque distribution method for a fast maneuvering satellite based on a hybrid actuator, the specific implementation process is as follows:
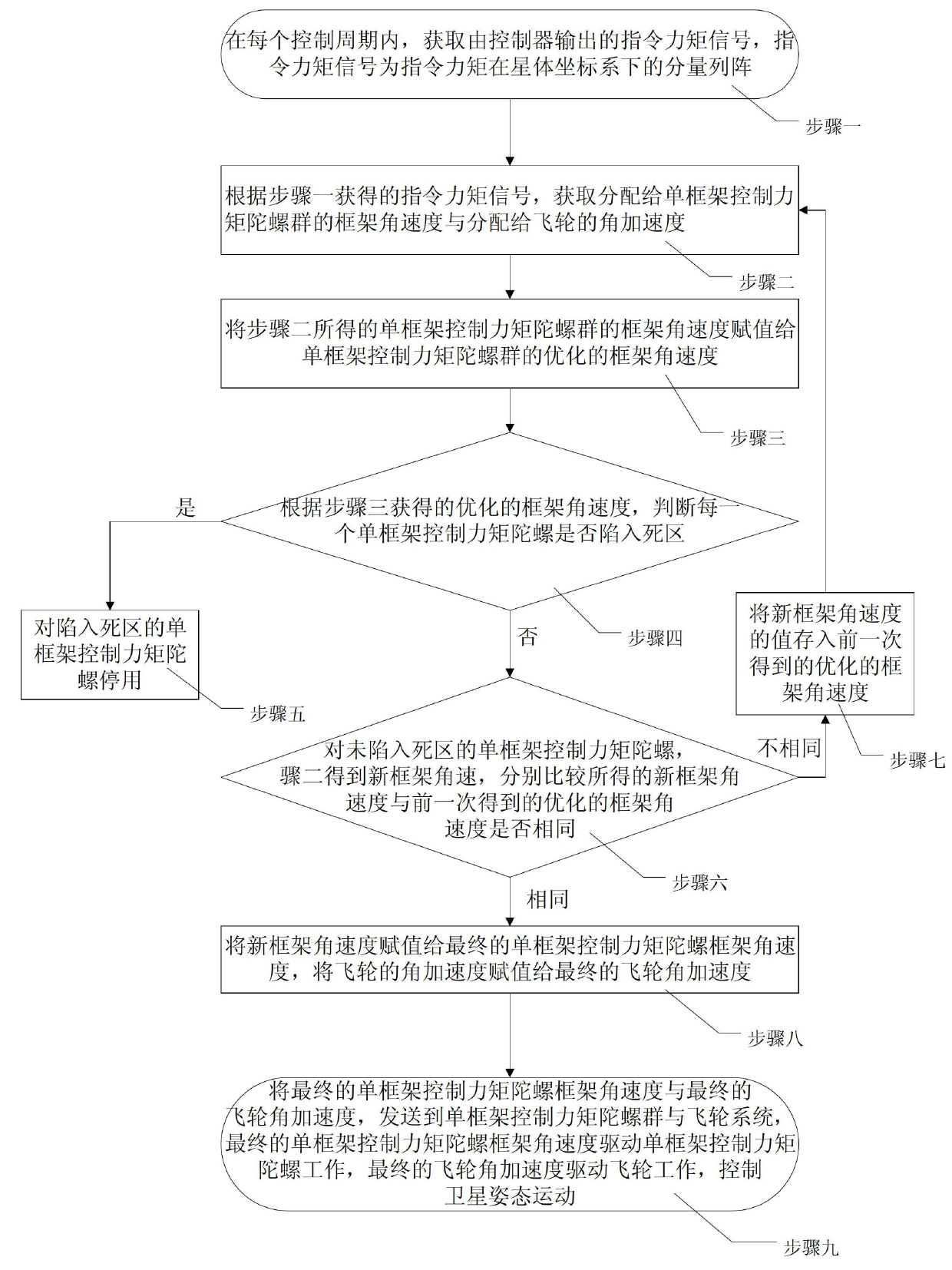
[0030] Step 1. In each control cycle, obtain the command torque signal T output by the controller c , command torque signal T c is the component array of the command torque in the astral coordinate system;
[0031] Step 2. According to the command torque signal T obtained in step 1 c , to obtain the frame angular velocity assigned to the single frame control moment gyro group with the angular acceleration assigned to the flywheel
[0032] Step 3. The frame angular velocity of the single frame control moment gyroscope group obtained in step 2 The optimized frame angular velocity assigned to the single frame control moment gyro group
[0033] Step 4. According to the optimized frame angular velocity obtained in st...
specific Embodiment approach 2
[0039] Specific implementation mode two: the following combination figure 1 Describe this embodiment, this embodiment is a further description of Embodiment 1,
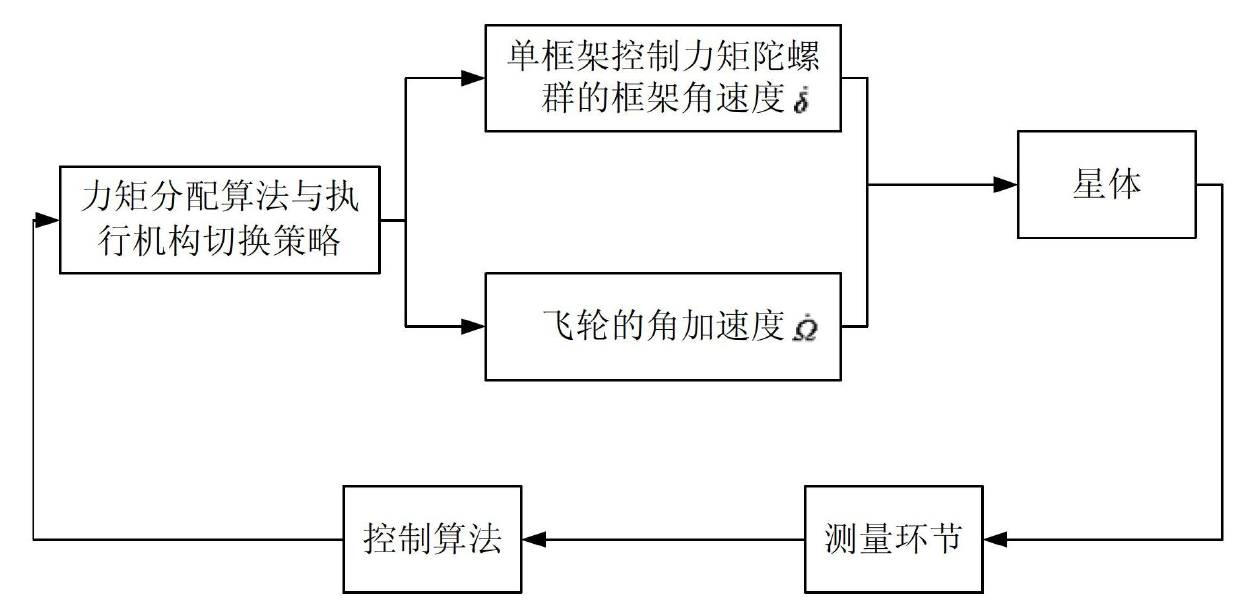
[0040] A torque distribution method for fast maneuvering satellites based on hybrid actuators, which obtains the frame angular velocity assigned to the single frame control moment gyro group Angular acceleration with flywheel The method is:
[0041] Step 21, write the optimization index with the weighting of the power consumption of n single-frame control moment gyroscopes and m flywheel systems and the angular momentum of the flywheel as the performance index:
[0042] J = 1 2 [ δ · T Q δ · + Ω · T W Ω · + ...
specific Embodiment approach 3
[0068] Specific implementation mode three: the following combination figure 1 Describe this embodiment, this embodiment is a further description of Embodiment 1,
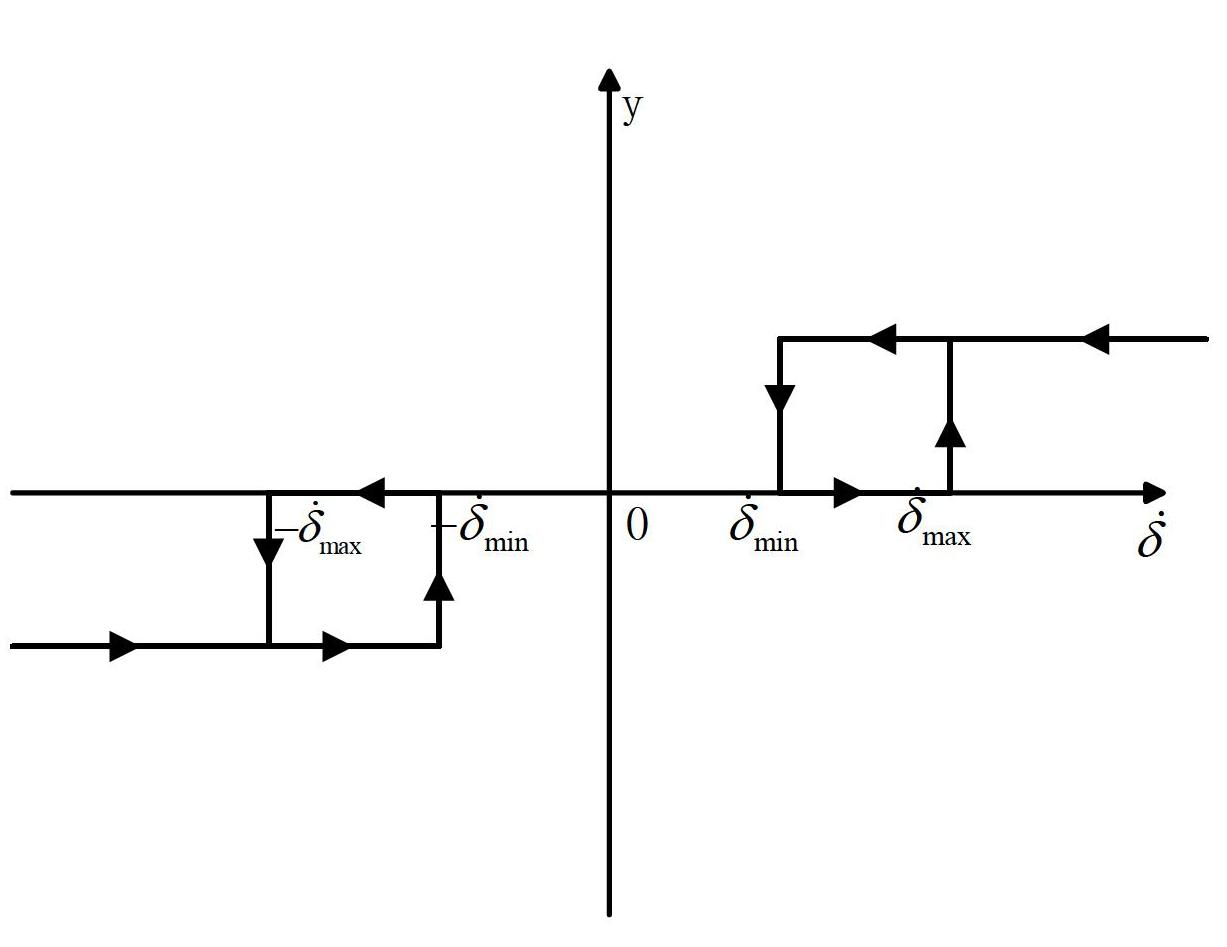
[0069] A method for moment distribution of a fast maneuvering satellite based on a hybrid actuator, wherein step 4 is based on the optimized frame angular velocity obtained in step 3 The method of judging whether each single-frame control moment gyro falls into the dead zone is as follows: if the absolute value of the frame angular velocity of the single-frame control moment gyro is gradually decreasing,
[0070] The absolute value of the frame angular velocity of the single frame control moment gyro is reduced to the minimum speed of the frame angle of the single frame control moment gyro Then it is determined that the single-frame control moment gyroscope falls into the dead zone;
[0071] Or: if the absolute value of the frame angular velocity of the single-frame control moment gyro is gradually increasing, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More