

Planar torsion spring suitable for robot joints
A flat torsion spring and torsion spring technology, applied in the field of robotics, can solve the problems of loose structure and large space occupation, and achieve the effect of promoting replacement, solving large space occupation and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0010] Further illustrate the present invention below in conjunction with accompanying drawing.
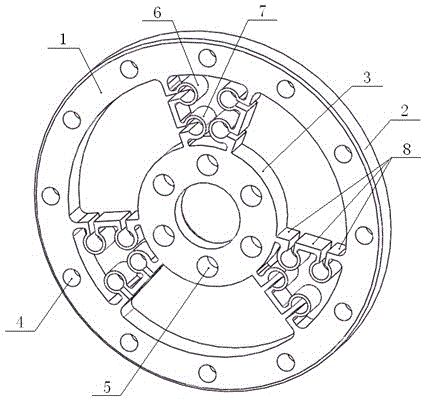
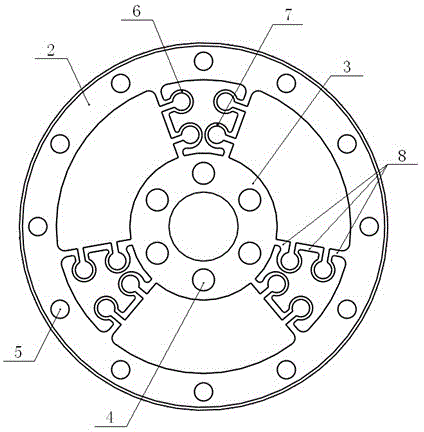
[0011] Such as figure 1 and 2 As shown, the plane torsion spring 1 of the present invention is composed of a torsion spring outer ring 2, a torsion spring inner ring 3 and several elastic bodies. Each elastic body is composed of two symmetrical elastic body units, each elastic body unit includes an outer circular hole groove 6, an inner circular hole groove 7 and a connecting beam 8, between the torsion spring inner ring 3 and the inner circular hole groove 7, Both the inner circular hole groove 7 and the outer circular hole groove 6 and between the outer circular hole groove 6 and the torsion spring outer ring 2 are connected by connecting beams 8 . Several outer ring screw holes 5 are evenly distributed on the torsion spring outer ring 2 to realize the connection with the joint load. A number of light holes 4 are evenly distributed on the inner ring 3 of the torsion spring to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More