Vision system based on active panoramic vision sensor for robot
A technology of robot vision and panoramic vision, which is applied in two-dimensional position/channel control and other directions, and can solve problems such as poor real-time performance, large consumption of computer resources, and limited detection range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] The present invention will be further described below in conjunction with the accompanying drawings.
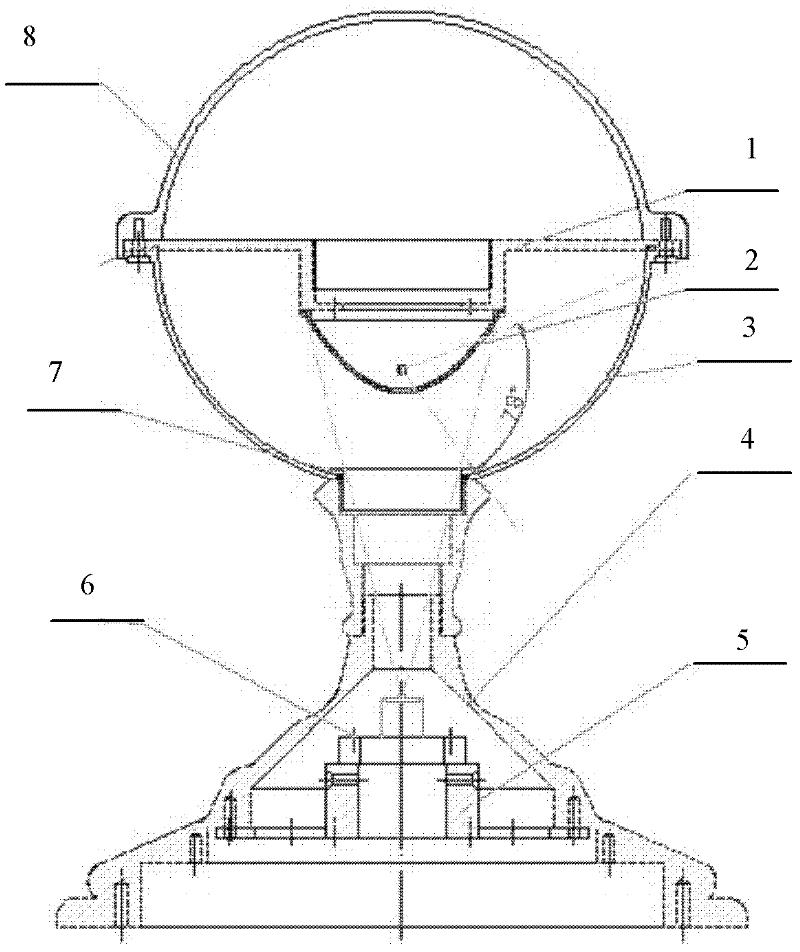
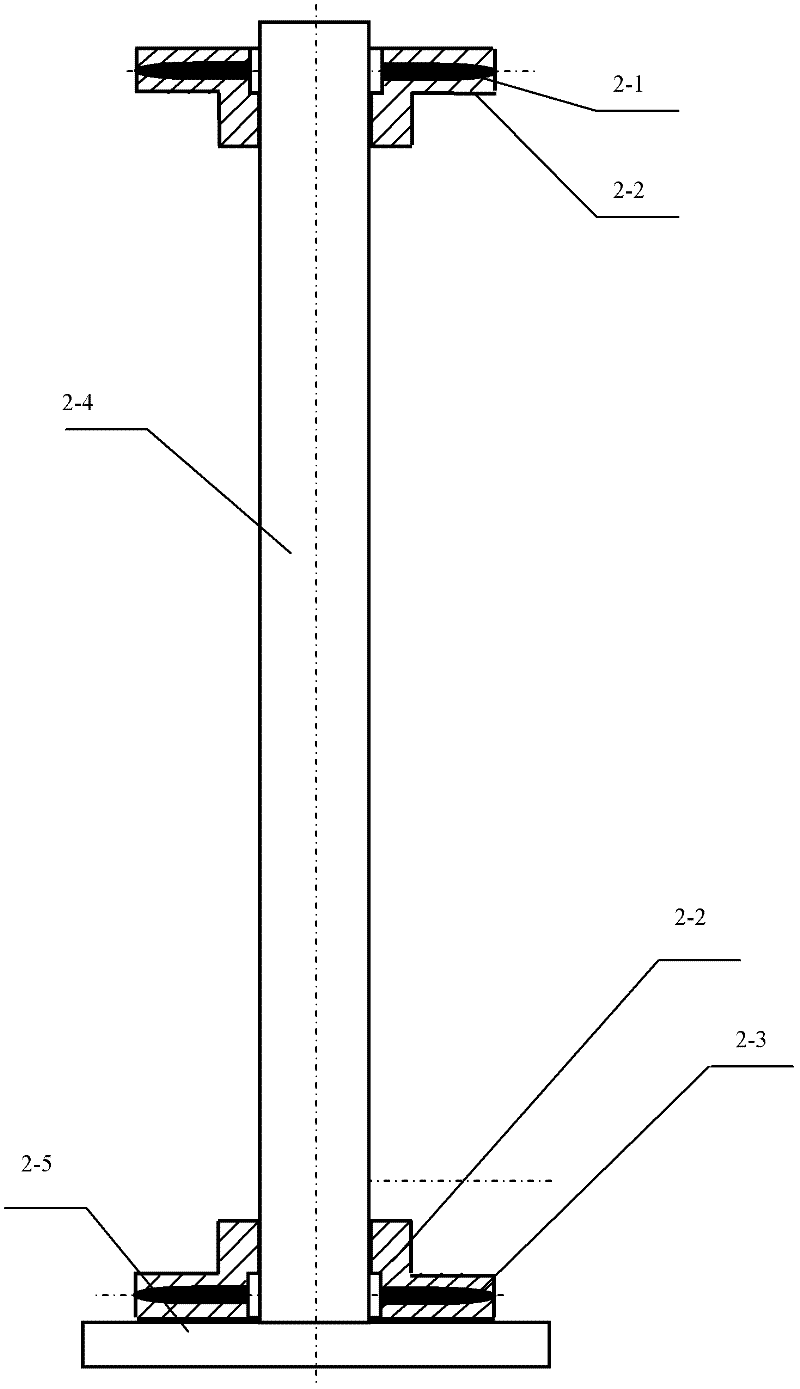
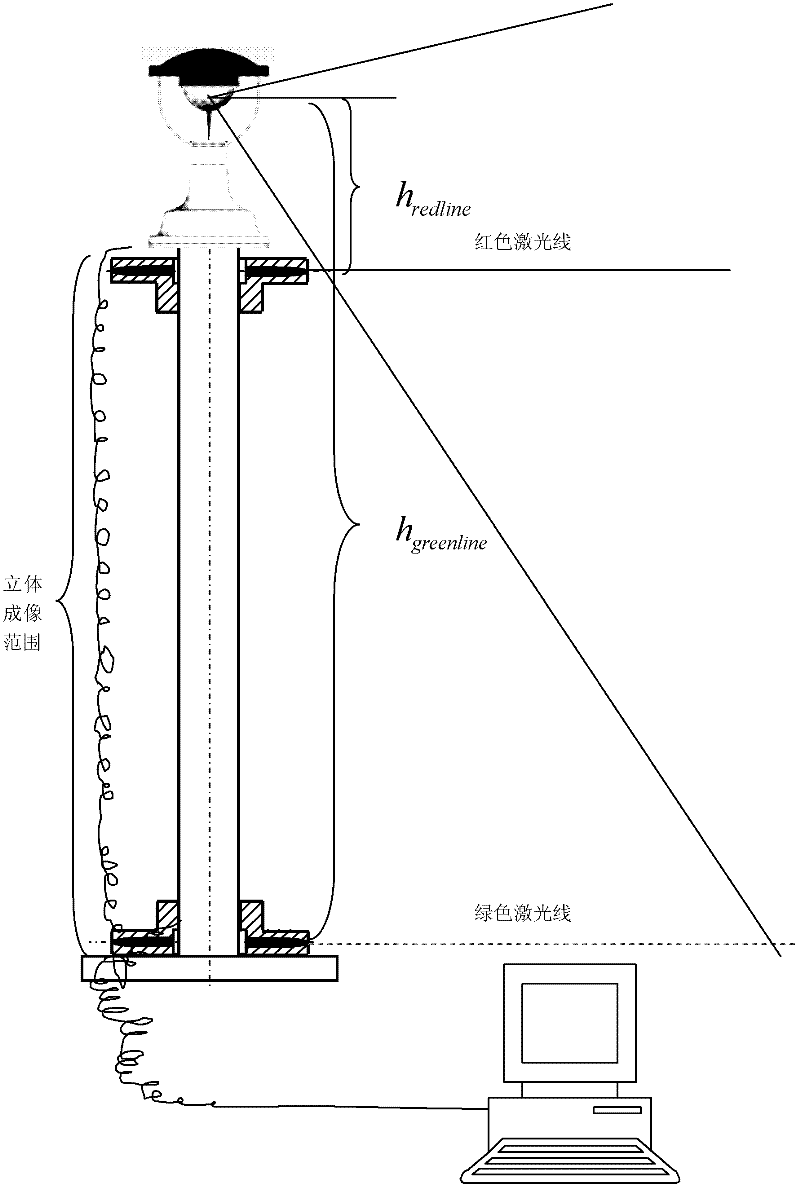
[0080] refer to Figure 1 to Figure 15 , a robot vision system based on an active panoramic vision sensor, including an omnidirectional vision sensor, a key-surface laser light source, and a microprocessor for three-dimensional stereoscopic camera measurement, obstacle detection, obstacle avoidance, and navigation for omnidirectional images. The center of the omnidirectional vision sensor and the center of the key surface laser light source are configured on the same axis; the omnidirectional vision sensor includes a hyperboloid mirror 2, an upper cover 1, a transparent semicircular cover 3, a Fixing seat 4, camera unit fixing seat 5, camera unit 6, connection unit 7, upper cover 8, as attached figure 1 As shown; the hyperboloid mirror 2 is fixed on the upper cover 1, and the connecting unit 7 connects the lower fixing base 4 and the transparent semicircular cover 3 i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More