

Method for improving resolving precision and anti-jamming capability of attitude heading reference system
A heading attitude reference system and calculation technology, which is applied in the field of improving the calculation accuracy of the heading attitude reference system and the system's anti-interference ability, can solve the problems affecting the real-time performance of the system and increasing the computational complexity of the system, so as to reduce the computational complexity, Effects of improving attitude accuracy, improving stability and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
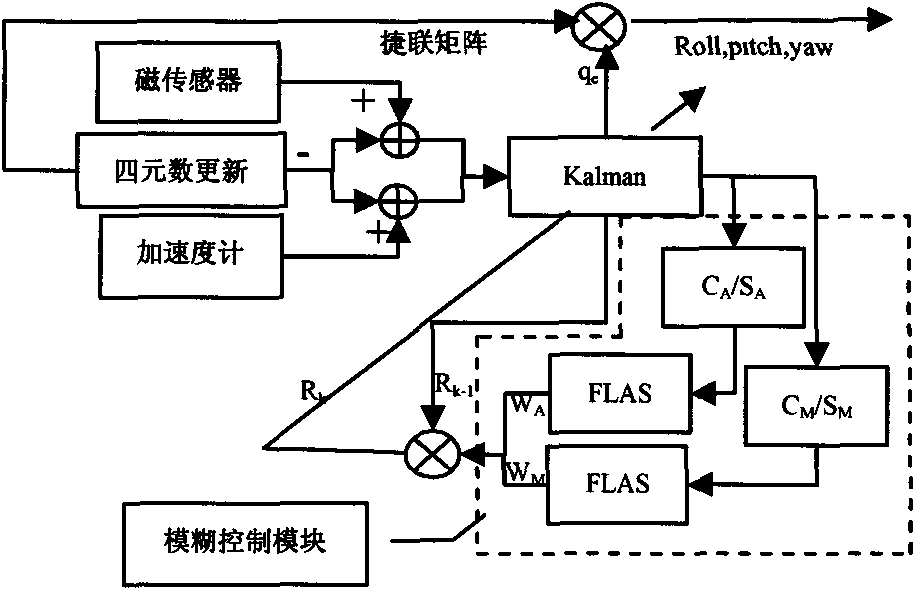
[0019] The present invention will be described in detail below in conjunction with the accompanying drawings: the present invention is a method for improving the calculation accuracy of the attitude reference system and the system's anti-interference ability.
[0020] The method proposed by the present invention is based on conventional kalman filtering, combined with fuzzy control theory, real-time estimation of measurement noise, realizing adaptive filtering, improving the solution accuracy and anti-interference ability of the system, and the attitude reference system is mainly composed of micromechanical A gyroscope, a micromachined accelerometer and a geomagnetic sensor are used to measure the attitude information of a moving carrier in real time; the method specifically includes the following steps:
[0021] First, the system is initialized according to the output of the accelerometer and the magnetic sensor, and the rough alignment process is completed;
[0022] Second, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More