Automobile automatic parking method based on humanoid intelligent control
An intelligent control and automatic parking technology, applied in the field of automatic parking of cars based on human-like intelligent control, can solve the problems of large amount of calculation, difficulty in obtaining data, poor universality, etc., and achieve small amount of calculation and universal application good sex effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] The present invention will be further elaborated below according to the accompanying drawings and specific implementation. Take automatic parallel parking on the right as an example for illustration.
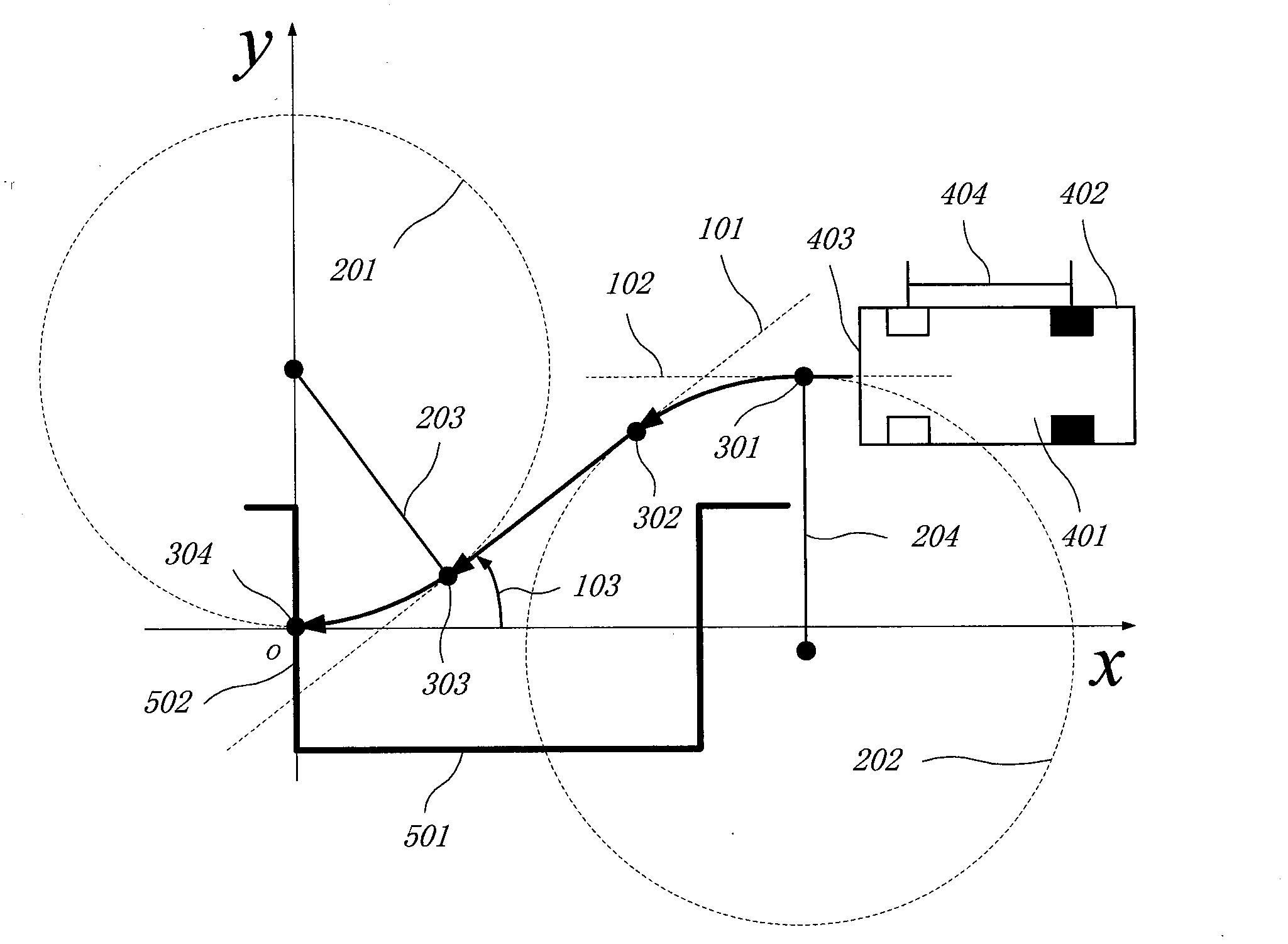
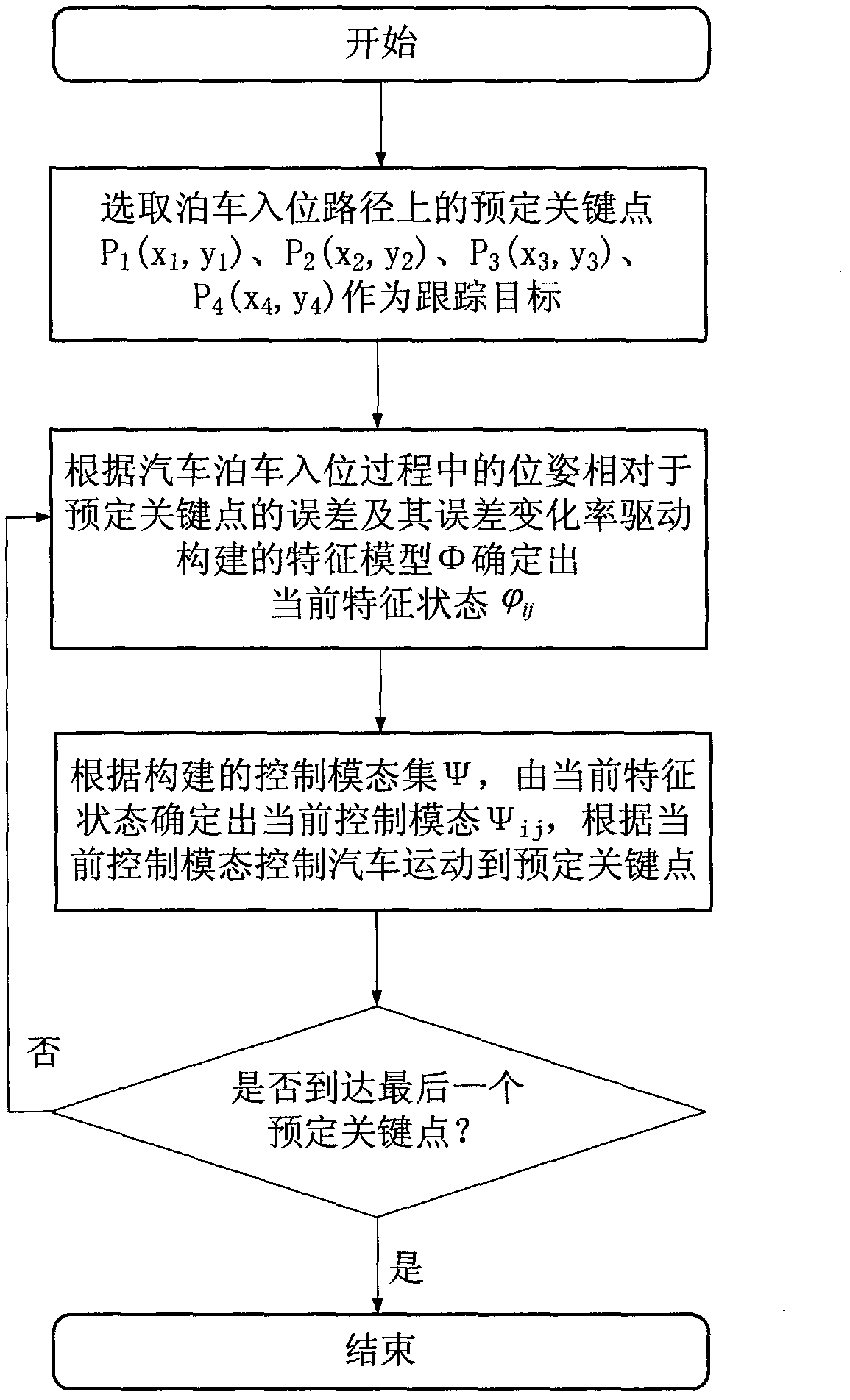
[0045] (1) According to the vehicle width W c , front wheel angle Minimum turning radius R m , parking space length L p , parking space width W p , to determine the predetermined key point P on the parking path 1 (x 1 ,y 1 ), P 2 (x 2 ,y 2 ), P 3 (x 3 ,y 3 ), P 4 (0, 0) as the tracking target, the method is as follows:
[0046] To predetermine the key point P 4 (0, 0) establishes a Cartesian coordinate system XOY for the origin O;
[0047] Take the straight line l 1 : y=ax+b, (a=tanθ 0 for l 1 the slope of the line, is the maximum value of the front wheel rotation angle, ( W p 2 ) ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com