

Complex road detection method under gradient point pair constraint
A road detection and gradient point technology, which is applied in image data processing, instrumentation, calculation, etc., can solve problems such as impact and missing lane lines
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the accompanying drawings and specific examples.
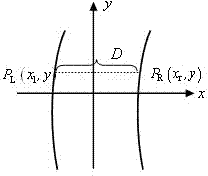
[0035] The present invention proposes a complex road detection method based on gradient point pair constraints. This method further adds geometric feature information of structured lanes to In the lane detection, the detection of the lane lines on both sides is converted into the estimation of the linear hyperbolic model parameters of the lane center line and the lane perspective projection parameters, and the detection of the lane lines on both sides of the lane is finally realized by using two Hough transforms. The specific steps are as follows:
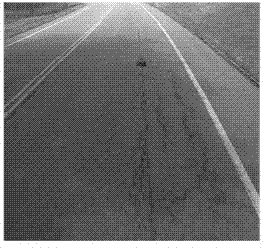
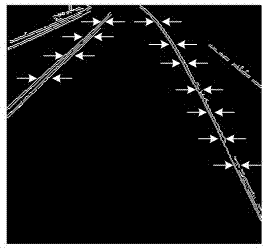
[0036] Step 1. Image edge detection
[0037] Use Sobel operator and morphological filtering method to detect the edge of the original image, and obtain the binary image bw, as shown in Figure 1(a) and Figure 1(b).
[0038] In order to eliminate the influence of noise on the edge image, the present in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More