

Full-view probing robot monobody for complex region at ferromagnetic environment
A robot and environment technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as difficulty in realization, motion stagnation, and inability to move, so as to ensure motion stability, strong environmental adaptability, and efficient adjustment of step distance Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described in detail below in conjunction with the accompanying drawings.
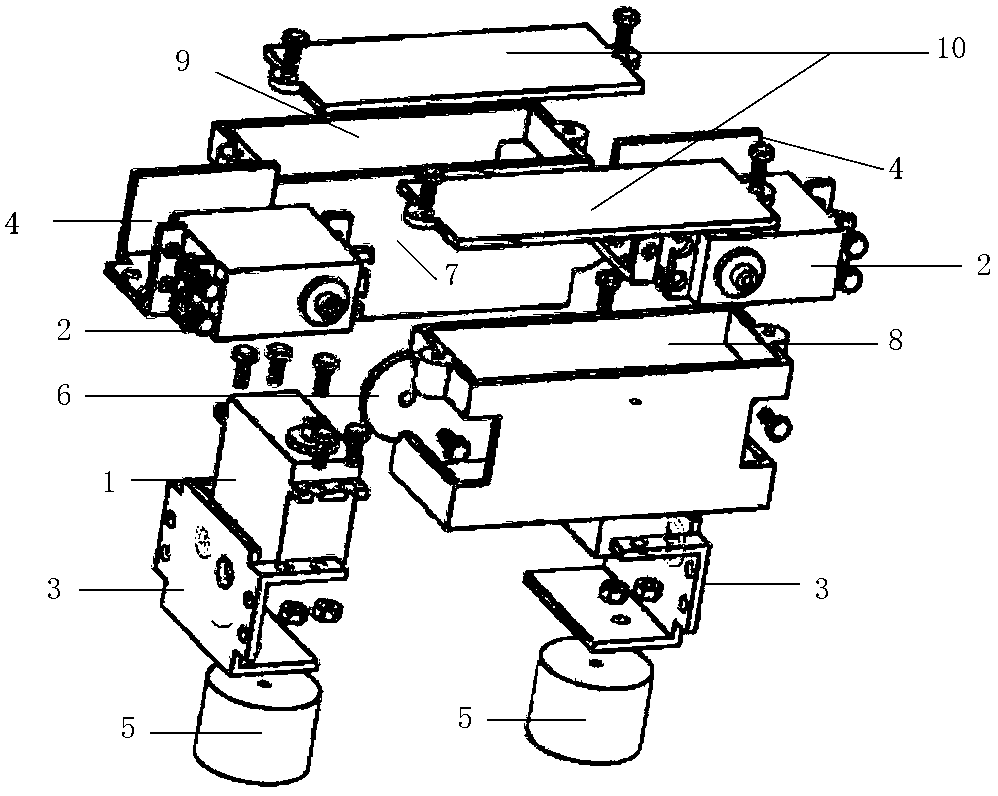
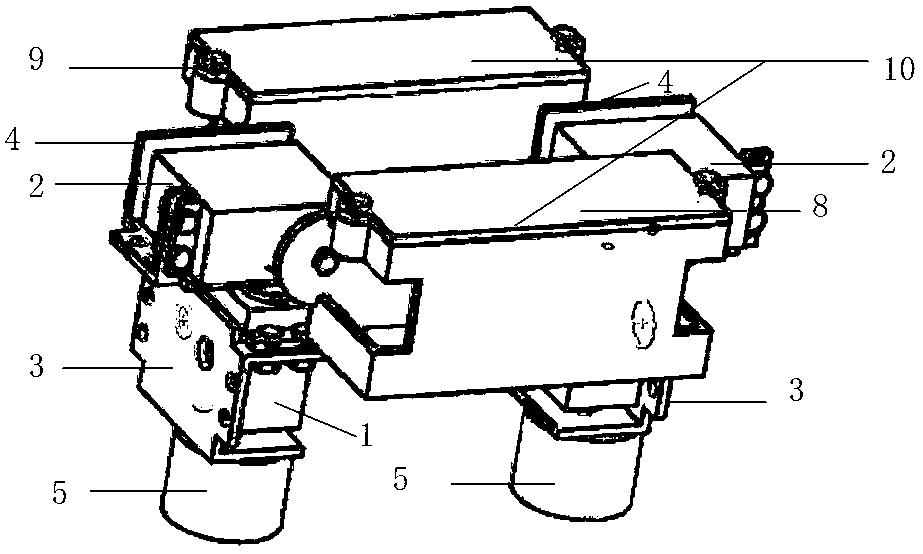
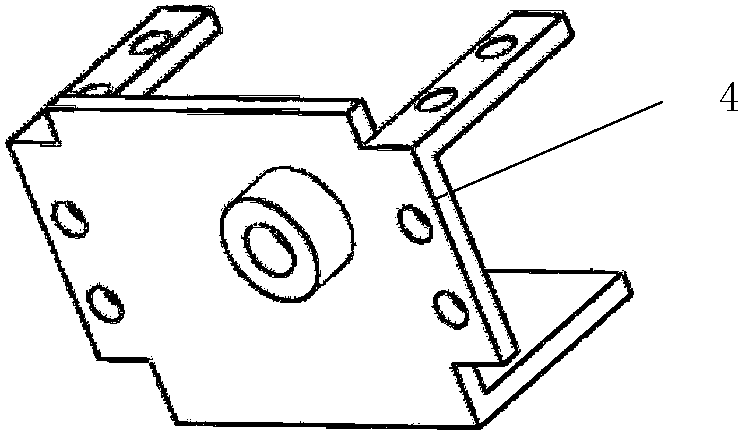
[0030] The present invention proposes a single panorama detection robot in complex ferromagnetic environment, such as figure 1 and figure 2 As shown, it includes the two-foot part and the main body part. The two-foot part includes two parts, the left and right feet. The connection methods are exactly the same. After the connection, the left and right feet are mirror-symmetrical, and the structure of the steering gear bracket B4 in the left and right feet is mirror-symmetrical, as shown in Figure 3-5 . Both the steering gear bracket A3 and the steering gear bracket B4 are L-shaped bracket structures, the steering gear A1 is connected to the bracket frame of the steering gear bracket A3 through M3 bolts, and the steering gear B2 is connected to the steering gear through M3 bolts In the bracket frame of the bracket B4, the bottom of the short bracket of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More