Following type spine self-positioning navigation operation machine hand and positioning method thereof
A robotic hand and self-positioning technology, which is applied in the field of medical surgical instruments, can solve the problems of easy image drift, difficult to further improve the insertion accuracy, and easy interference of the tracking system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] The core of the present invention is to provide a follow-up spinal self-positioning navigation surgical robot based on specific point locking, which can determine the placement point and placement direction of pedicle screws with high precision, and improve the accuracy of spinal surgery. On this basis, another core of the present invention is to provide a positioning method for the above-mentioned follow-up self-positioning and navigation surgical robot.
[0050] In order to enable those skilled in the art to better understand the technical solutions of the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
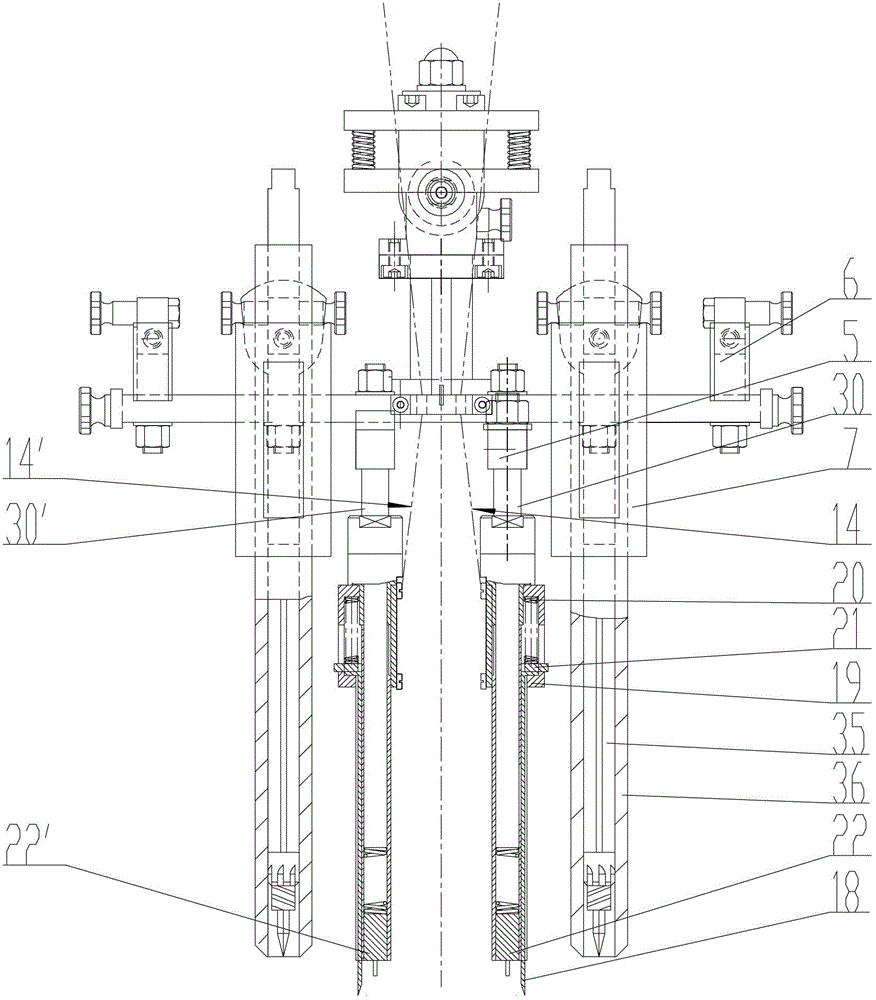
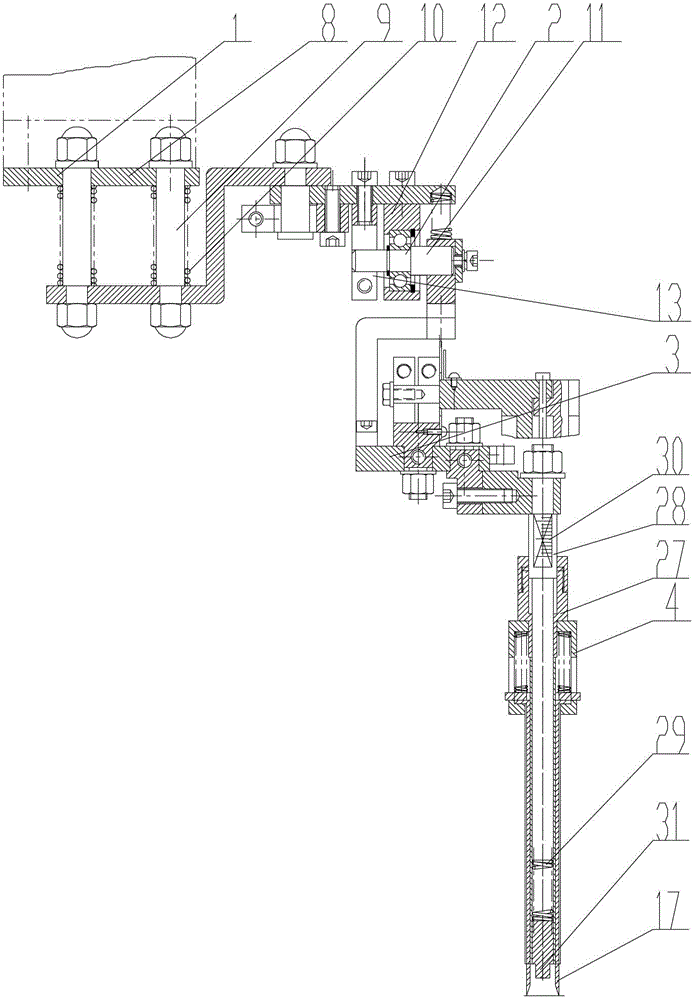
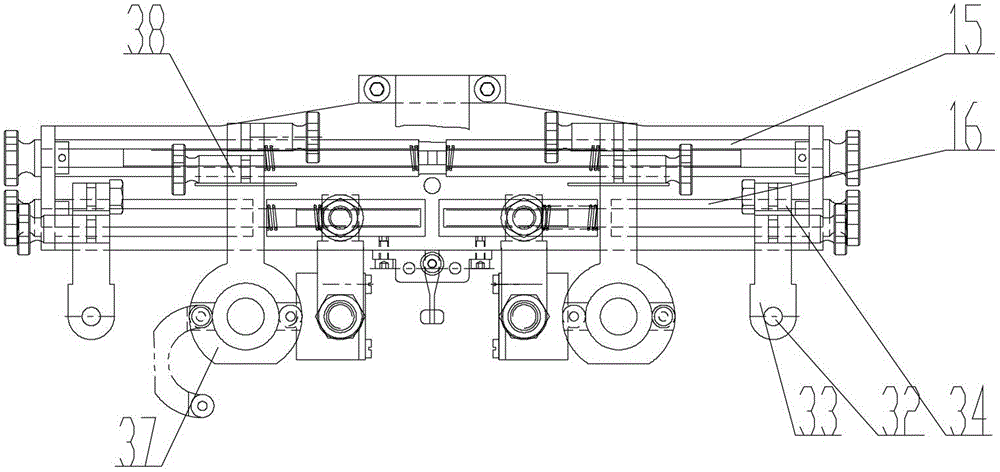
[0051] Please refer to Figure 1 to Figure 4 , figure 1 The front view of the robot hand for self-positioning and navigation of the follow-up spine; figure 2 Side view of the surgical robotic hand for self-positioning and navigation of the follow-up spine; ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap