

Intelligent braking system
A braking system and intelligent technology, applied in the field of car braking and car avoidance, can solve problems such as short braking time, collision between cars and obstacles, falling off cliffs, etc., and achieve the effect of avoiding car collisions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
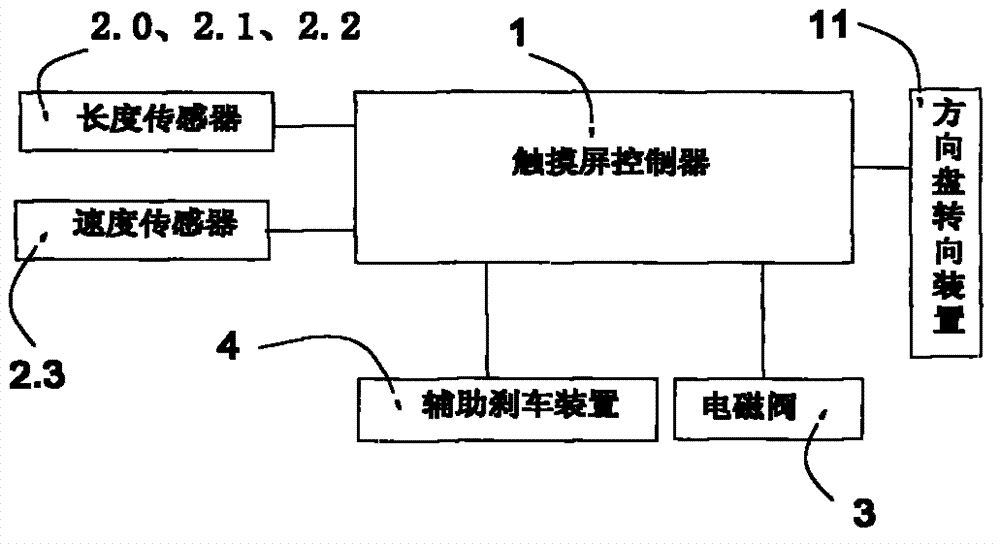
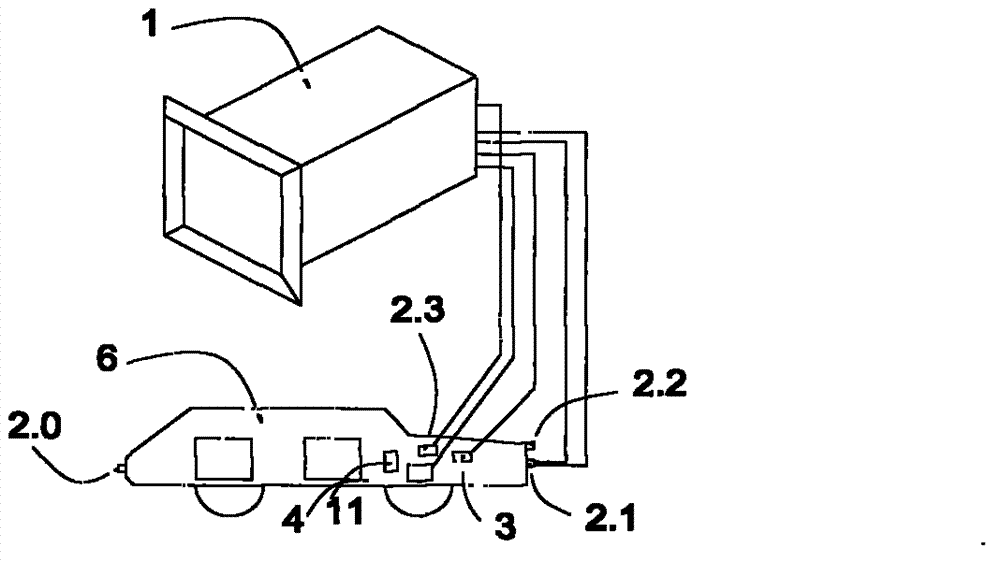
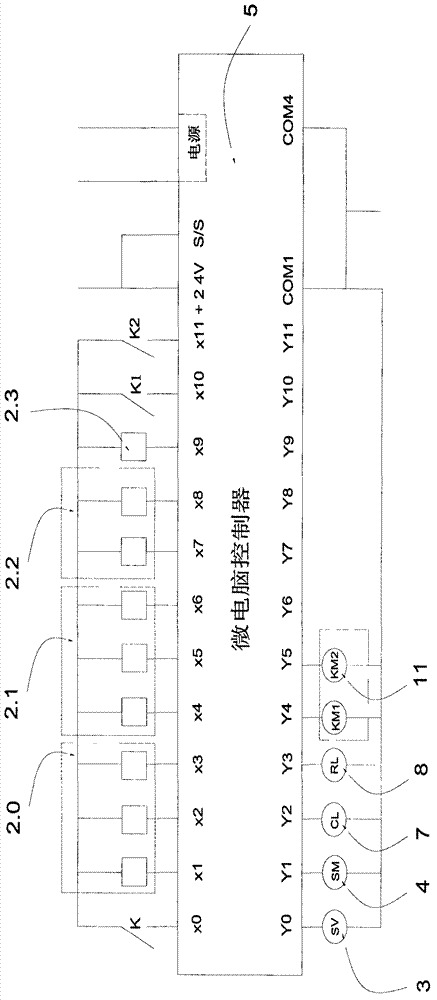
[0019] Such as Figure 1 ~ Figure 3 As shown in the intelligent braking system, the touch screen display is connected with the microcomputer controller 5 to form a touch screen controller 1 and installed in the cab of the car 6; the length sensor 2.0 is installed at the rear of the car, the length sensors 2.1 and 2.2 are installed at the front of the car, and the length sensor 2.1 Along with the rotation of steering wheel, rotate with steering wheel same direction; Speed sensor 2.3 is connected with the original speedometer of automobile 6, and the signal line of speed sensor 2.3 is connected with microcomputer controller 5; Solenoid valve 3 is connected with throttle pipeline; Steering wheel steering device 11, The sensor, electromagnetic valve 3 and auxiliary braking device 4 are respectively connected with the microcomputer controller 5 through signal lines.
[0020] Such as Figure 4 Shown is the situation of the car 6 running on a straight road, the car forward switch ...
Embodiment 2
[0023] Such as Image 6 Shown is the situation of automobile 6 running on the road curve, its structure and working principle are the same as embodiment one, because the difference is the special situation of the road curve, when the length sensor 2.1 detects an obstacle, the distance f (f value may be compared Small), when the car 6 is moving forward on the curve, the length sensor 2.1 turns a certain angle in the same direction as the car steering wheel through the connection transmission mechanism of the car steering wheel, so that the length sensor 2.1 can detect obstacles earlier, which is the first step for the car 6 Braking wins time; when the f value is less than or equal to the b value in example one, the microcomputer controller 5 outputs a strong signal to the auxiliary braking device 4 and the steering wheel steering device 11, and the auxiliary braking device 4 brakes the automobile, and the steering wheel The signal that steering gear 11 roots are outputted by mi...
Embodiment 3
[0025] Such as Figure 7 Its structure and control mode of the intelligent braking system shown are the same as in the first embodiment, that is, the control principle before the car 6 collides with the obstacle 9 when reversing is the same as that of the first embodiment. Before the car 6 hits the obstacle 9 when reversing, the car The front length sensor 2.1 of 6 and the length sensor 2.2 facing the ground will not work, because the speed of reversing is relatively slow, as long as the distance set between the car 6 and the bumped obstacle 9 is within d meters, the auxiliary braking device 4 of the car 6 All brakes as required; whether to carry out all brakes can also be determined according to the habits of the car owner, only needing to change the program of the microcomputer controller 5 can be realized.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More