

Cable climbing robot
A robot and cable-climbing technology, which is applied in the field of industrial robots, can solve the problems of trolley slipping and affecting stability. The cable detection robot can not solve the problems of trolley slipping and backwards well, so as to achieve good hugging effect, solve trolley slipping, and good The effect of the obstacle course effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
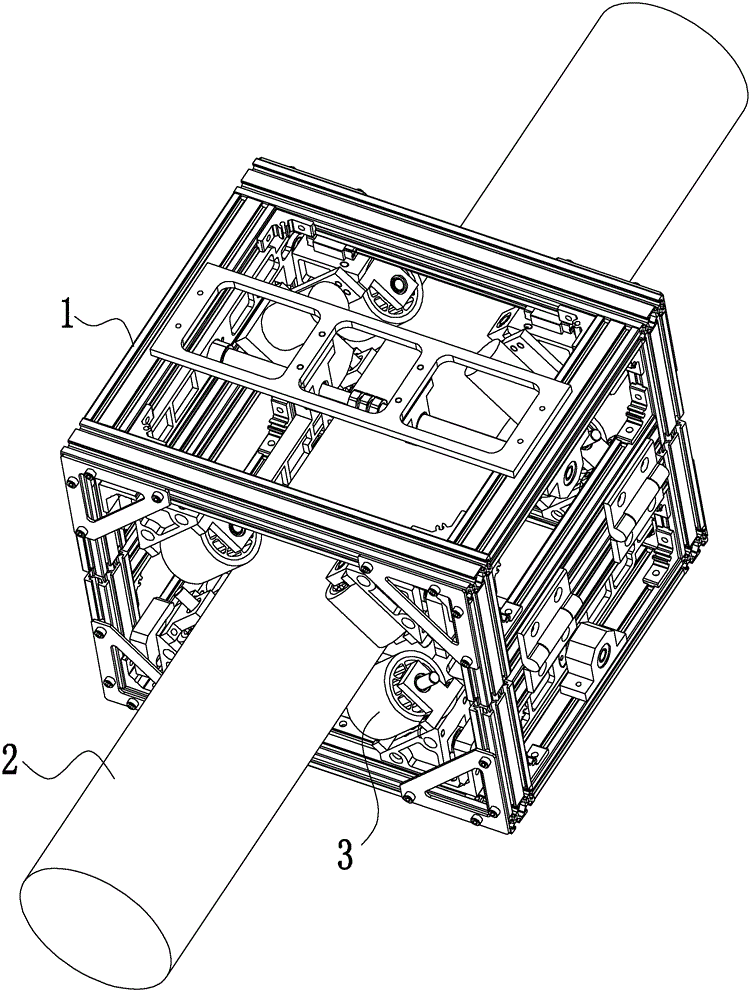
[0026] Such as figure 1 As shown, a cable-climbing robot includes two trolleys 1 arranged symmetrically along the circumferential direction of the cable 2 and a gripping device arranged on the two trolleys for gripping the cables. The trolley is equipped with a detection device for detecting cables and a lithium battery as a power source.
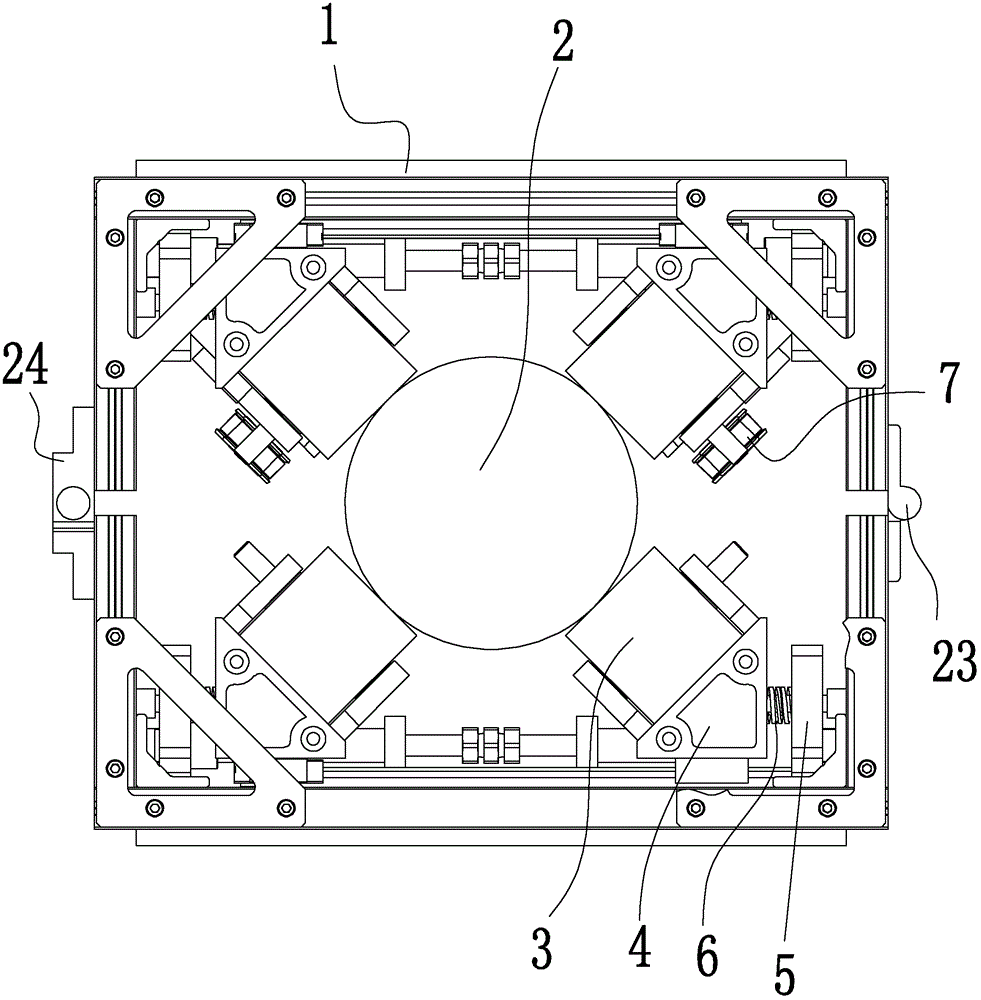
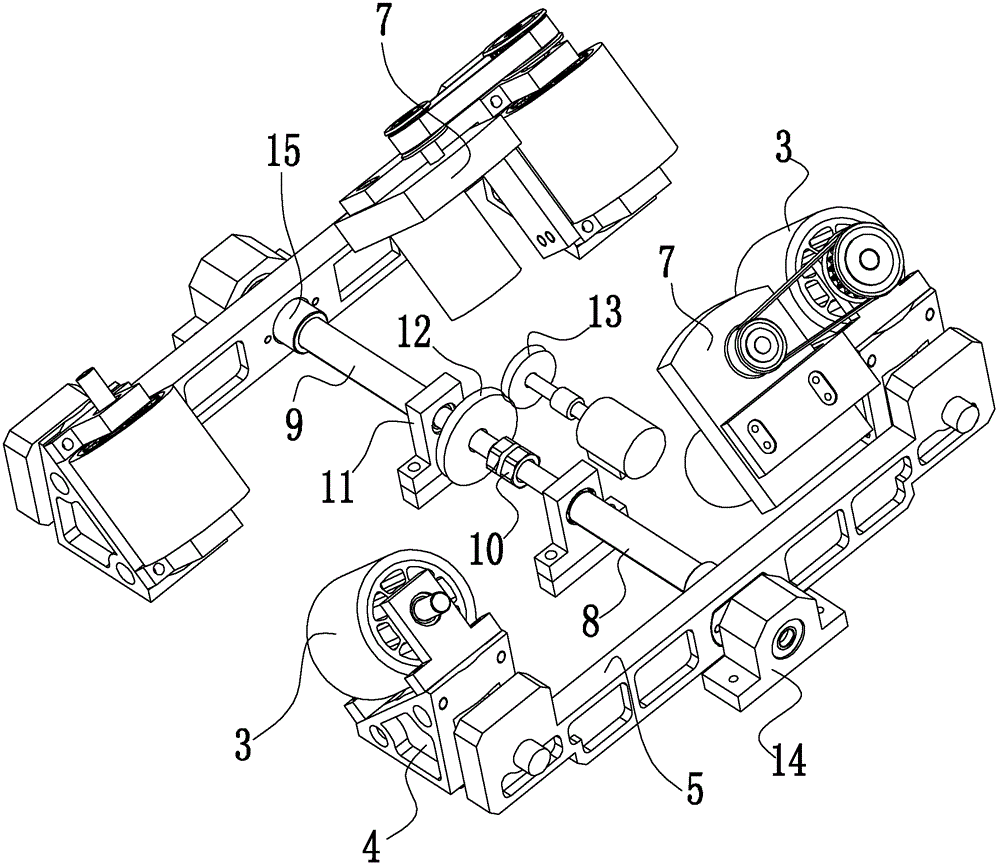
[0027] Such as figure 2 , Figure 4 , Figure 5 As shown, the holding device includes mutually parallel guide rails 25 respectively arranged on the front and the rear of the two trolleys 1 . The guide rails on the two trolleys are also parallel to each other. The guide rail 25 is perpendicular to the cable 2 axis. Two roller brackets 4 are slidably provided on each guide rail, and the two roller brackets are arranged symmetrically along the center line of the guide rail. The roller bracket 4 is in the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More