Two-dimensional space multi-route planning method based on niche particle swarms
A two-dimensional space and niche technology, applied in special data processing applications, instruments, electrical digital data processing, etc., can solve problems such as difficult to reflect task requirements, incomplete application of optimal paths, imperfections, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be described in detail below with reference to the drawings and embodiments.
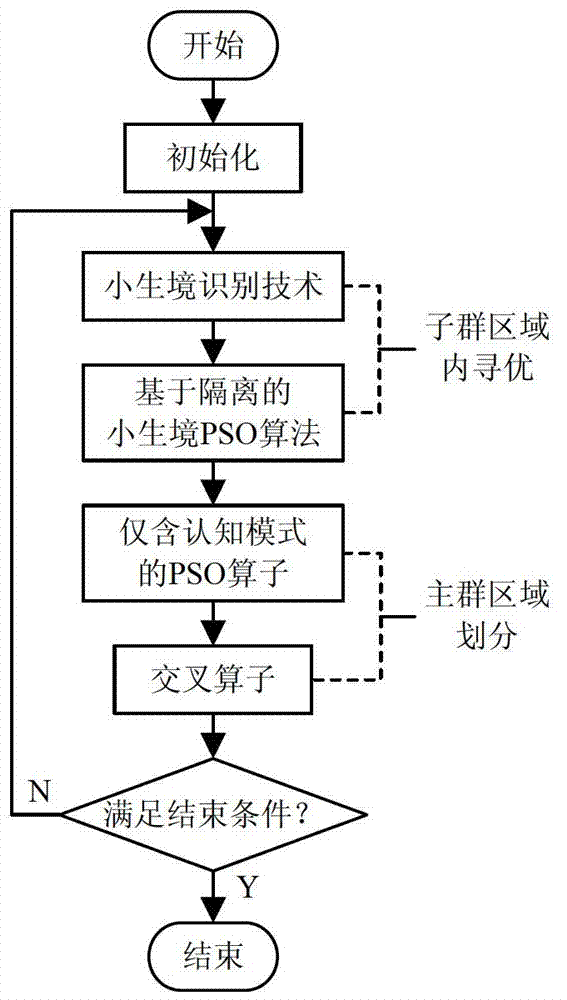
[0052] The present invention proposes a two-dimensional space multi-path planning method based on niche particle swarms, such as figure 1 As shown, it specifically includes the following steps:
[0053] Step 1: Environment modeling, particle coding and main group particle initialization.
[0054] A: Environment modeling and particle coding:
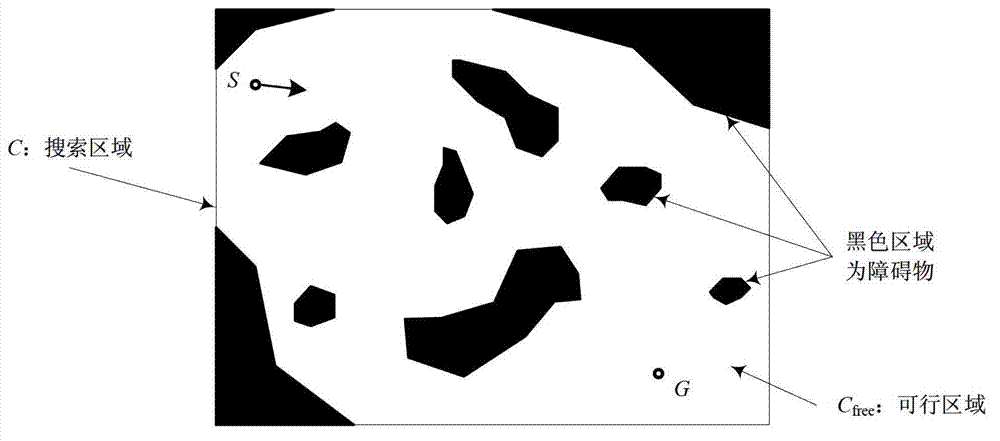
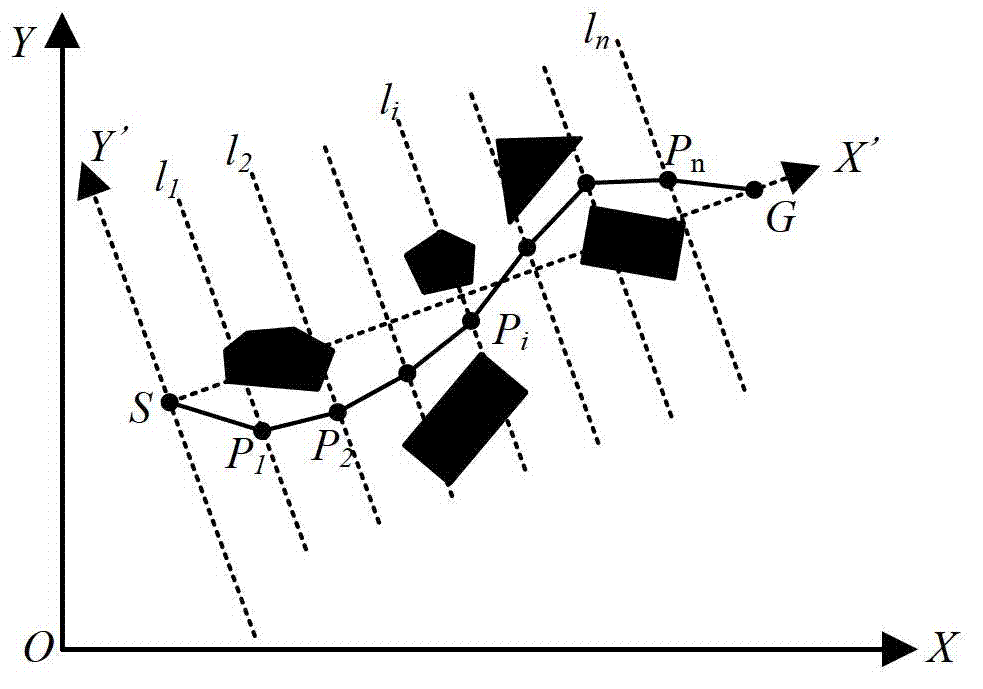
[0055] Carry out two-dimensional space modeling of the environment, only consider the static known environmental constraints, the environmental constraints are expressed in the Cartesian coordinate system O-XY, the obstacles are represented by irregular polygons, only the vertices of the obstacles are described, and the obstacles are recorded The coordinates of each vertex; the obstacle is expanded with the maximum size of the ship, and the ship is abstracted into a particle with a negligible size. The evaluation of path saf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com